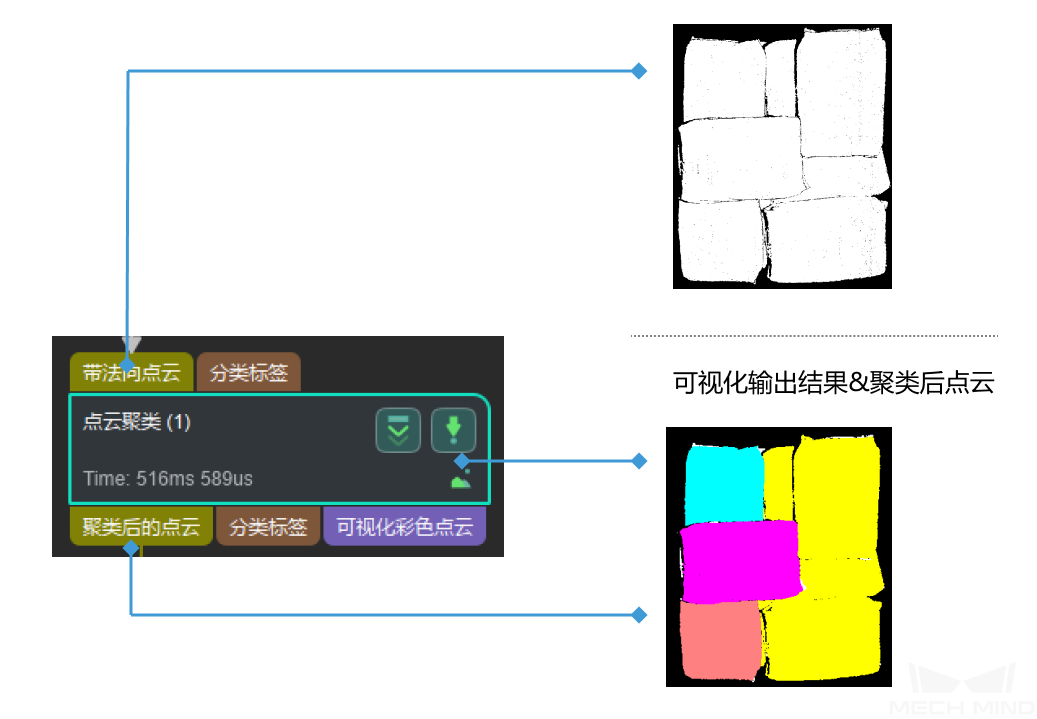
点云聚类

使用场景
一般用于点云预处理,排除干扰点云。
点云聚类支持两种聚类方法,利用欧几里得距离(EuclideanCluster)进行聚类和区域生长分割(RegionGrowingSeg)方法进行聚类。
如果点云在空间上有明显的分离,推荐使用欧式聚类(EuclideanCluster);如果点云在空间上是连续,但在连接处的曲率变化大时,推荐使用区域生长分割(RegionGrowingSeg)。
参数说明
聚类算法
默认值:EuclideanCluster
值列表:EuclideanCluster,RegionGrowingSeg
调节说明:此参数用于选取聚类方法,共两种聚类方法。在实际工程中,建议使用EuclideanCluster算法,先介绍此算法参数。
-
EuclideanCluster :根据距离远近判断是否属于一类
-
RegionGrowingSeg :根据法向和曲率判断是否属于一类
EuclideanCluster
- 输出类中相邻点最大距离
-
默认值:3.000 mm
参数解释:该参数用于设置聚类公差,单位为毫米(mm)。
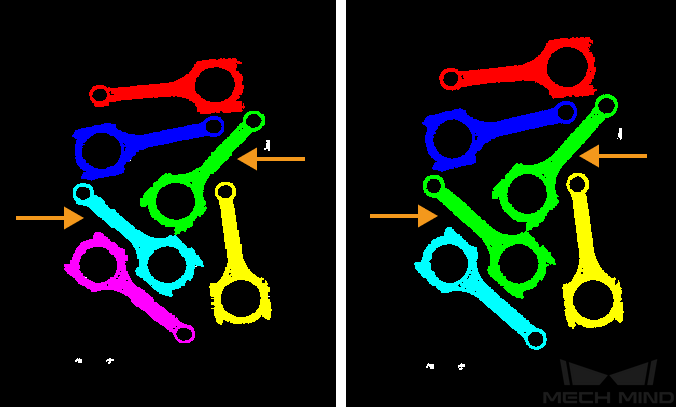
调节说明:当该参数调大时,间隔较远的点会被归为同一类别;当该值调小时,间隔较近的点会被分为不同类别。
调节示例:如下图所示。左图为该参数为 3.000 mm 时的结果,右图为该参数调整为 5.000 mm 后的结果。可以看出调整参数后,橙色箭头所指的点云的颜色均为绿色,即被归为同一类别。
- 并行核数
-
默认值:4
调节说明:该参数用于调节区域生长过程中的相邻点的法向角度差异阈值,当该值调大时,对于相邻像素点的法向角度差异的容忍度变大,角度差异较大的点仍会被归为一类。
RegionGrowingSeg
- 相邻点数目
-
默认值:30
调节说明:该参数用于调节区域生长过程中的搜索像素点的数目。当该值调大时,搜索的像素点数数目变多,区域生长较快,导致聚类得到的类的数目变少。
- 平滑度阈值
-
默认值:4
调节说明:该参数用于调节区域生长过程中的相邻点的法向角度差异阈值。当该值调大时,对于相邻像点的法向角度差异的容忍度变大,角度差异较大的点仍会被归为一类。
- 曲率阈值
-
默认值:1
调节说明:该参数用于调节区域生长过程中的点的曲率的阈值上限。
- 类的最小点数
-
默认值:800
调节说明:该参数用于过滤聚类之后的结果,须满足大于类的最小点数这一条件的类才会输出。当该参数调大时,最终输出的类的数目会减少;该参数调小时,最终输出的类的数目变多。
类的最大点数
默认值:3000000
调节说明:该参数用于过滤聚类之后的结果,须满足小于类的最大点数这一条件的类才会输出。当该参数调大时,最终输出的类的数目会变多,过大则不会产生较大影响;该参数调小时,最终输出的类的数目减少。
调节示例:假设点云聚类出来 5 类,点数分别为 10000、20000、30000、40000、50000。如果类的最大点数设置为 45000,最小点数设置为 15000,那么点数为 10000 与 50000 的类将被过滤掉,只输出点数为 20000、30000、40000 的类。
- 使用 GPU
-
默认值:不勾选
参数解释:该参数用于设置是否启用 GPU 加速计算。