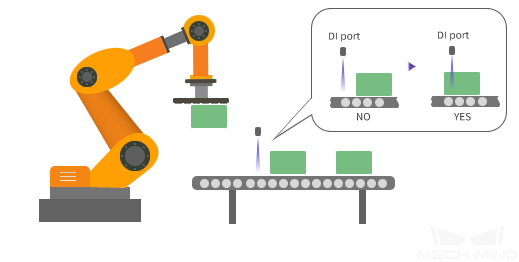
检查DI
| 从 v1.8.0 开始,“检查DI”步骤与“检查多个DI”步骤合并为新的“检查DI”步骤。 |
参数说明
非移动步骤基本参数
预规划出口
| 规划:软件尝试找到一条机器人可以在无碰撞的情况下到达目标位置的路径的过程。 |
对于可能中断规划的步骤(如:检查DI),软件无法在规划阶段提前预知此类步骤在实际执行时的出口。 因此可以指定一个预规划出口,使软件沿指定出口后的分支流程进行完整规划。通常会指定实际运行时步骤最有可能走的出口。
|
若“跳过执行”设置为“无”,在仿真运行时,软件将随机给出 DI 值,此步骤出口将随机。 |
预规划出口
| 规划:软件尝试寻找一条机器人可以无碰撞到达目标位置的路径的过程。 |
对于可能打断规划的步骤,软件无法在规划阶段提前预知此类步骤在实际执行时的出口。 此时可指定一个出口进行预规划,使软件跨越此步骤综合考虑该步骤两侧的情况。
此步骤需要检测到真实的DI信号后,才能执行对应端口后的分支流程,所以会打断规划。为了将该步骤前后的步骤连起来共同规划,使机器人整体运行更为流畅,您可以指定预规划的出口,进而执行指定端口后的分支流程。
-
设置为 -1 时,该步骤将正常检查当前的DI信号,并且打断整体规划。
-
设置为 0 或大于 0 时,信号将由对应端口输出,并将该步骤前后的步骤连起来共同规划,使机器人整体运行更为流畅。
此外,当实际出口和预规划出口不一致时,会以实际出口重新规划。
调节示例
-
信号来源为“视觉移动”时。DI端口及信号值的配置在“拆垛吸盘配置器”中完成。
参数设置
说明
任一信号满足 + 检查一次
当任一DI端口的信号值满足要求,执行“任一信号满足”后的分支流程;当DI端口的信号值都不满足要求,执行“全部不满足”后的分支流程。
任一信号满足 + 持续检查
在超时之前持续检查,当任一DI端口的信号值满足要求,执行“任一信号满足”后的分支流程;达到超时时间后执行“超时”后的分支流程。
全部信号满足 + 检查一次
只有当全部DI端口的信号值满足要求,执行“全部信号满足”后的分支流程;否则执行“至少一个不满足”后的分支流程。
全部信号满足 + 持续检查
在超时之前持续检查,只有当全部DI端口的信号值满足要求,执行“全部满足”后的分支流程;达到超时时间后执行“超时”后的分支流程。
-
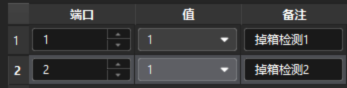
信号来源为“人为设定”时。以添加DI1、DI2、DI3三个端口为例进行说明。
参数设置
说明
任一信号满足 + 检查一次
当任一DI端口的信号值满足要求,执行对应端口后的分支流程;当全部端口的信号值都不满足要求,执行“全部不满足”后的分支流程。
任一信号满足 + 持续检查
在超时之前持续检查,当任一DI端口的信号值满足要求,执行对应端口后的分支流程;达到超时时间后执行“超时”后的分支流程。
全部信号满足 + 检查一次
只有当全部DI端口的信号值满足要求,执行“全部信号满足”后的分支流程;否则执行“至少一个不满足”后的分支流程。
全部信号满足 + 持续检查
在超时之前持续检查,只有当全部DI端口的信号值满足要求,执行“全部满足”后的分支流程;达到超时时间后执行“超时”后的分支流程。