点过滤

参数说明
点过滤方法类型
调节说明:用于过滤点云中的点的方法共有两种,根据工程实际情况进行选择:
-
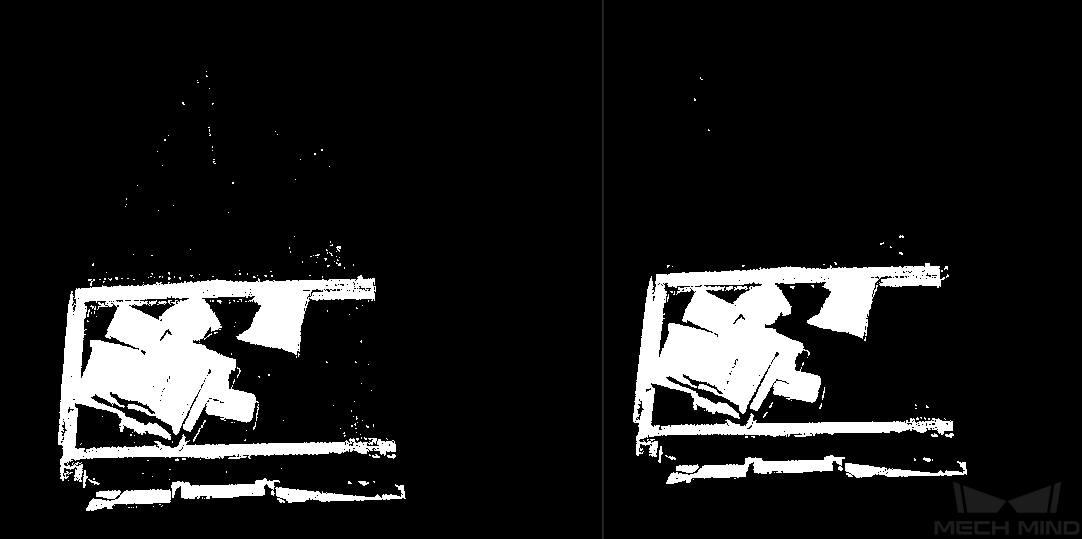
StatisticalOutlierFilter :统计滤波器根据给定参数,剔除范围外的点。建议在点云有明显离群点时使用,如下图所示。
-
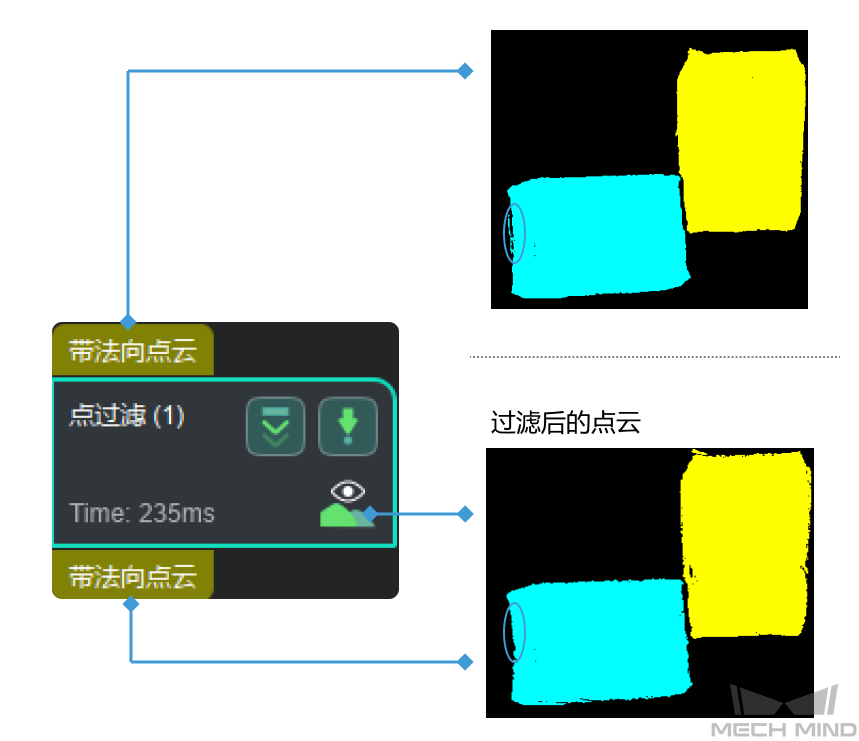
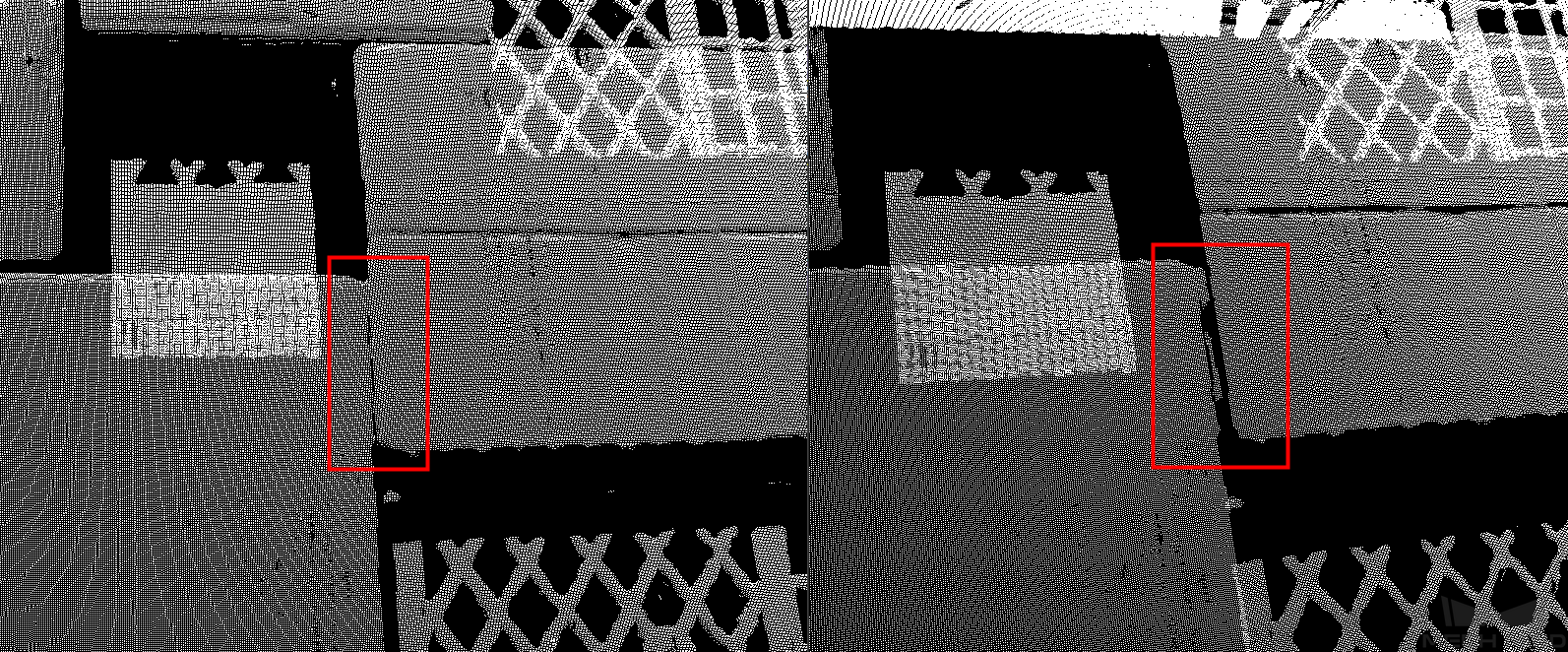
NormalsFilter :法向滤波器通过给定的参考方向,计算点云中每个点与参考方向的夹角,范围外的点将被过滤。建议在点云需要分层,避免粘连时使用,如下图红框所示。
StatisticalOutlierFilter
- 最近邻近点数
-
默认值:30
调节说明:该参数用于控制每次搜索的附近点的数目。该参数越大,用于计算平均距离值的近邻点的数目越多,涵盖范围越广。
- 标准偏差乘数
-
默认值:2
调节说明:该参数用于控制阈值判别条件中标准差的乘子大小。该参数越小,阈值越低,被保留下来的点的数目越少。但点的数目过于稀疏,所带来信息也会减少。
NormalsFilter
Reference Direction
- 使用机器人 Z 轴
-
默认值:不勾选
调节说明:该参数用于决定是否使用相机中机器人的Z轴作为参考方向,如果勾选该参数,则参考方向 X/Y/Z 值均失效。
- 参考方向 X 值
-
默认值:0
调节说明:该参数用于设置法向过滤的参考轴。由三个参数进行设定,X、Y 和 Z 三个参数组成了一个向量,用于设定参考轴的方向。当使用机器人 Z 轴被勾选之后,三个参数无效,参考轴为机器人 Z 轴。
- 参考方向 Y 值
-
默认值:0
调节说明:与参考方向 X 值调节方法一致。
- 参考方向 Z 值
-
默认值:-1
调节说明:与参考方向X值调节方法一致。
Angle Thresholding Settings
- 最小角度差
-
默认值:0
调节说明:该参数用于控制过滤点的过程中的角度差下限,单位为°。当点的法向量与参考向量之间的角度差低于该阈值时,点被过滤掉。
- 最大角度差
-
默认值:90
调节说明:该参数用于控制过滤点的过程中的角度差上限,单位为°。当点的法向量与参考向量之间的角度差超过该阈值时,点被过滤掉。