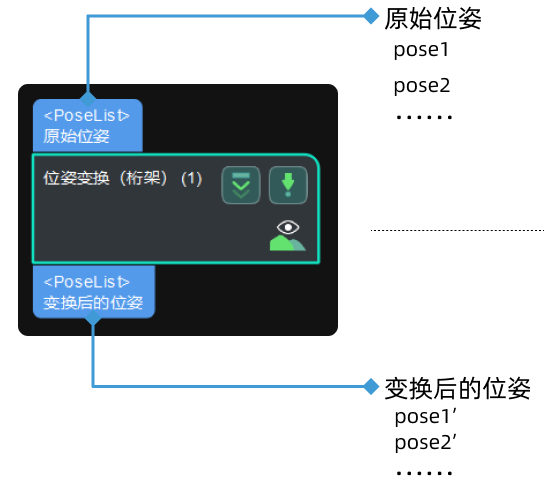
位姿变换(桁架) 您正在查看V2.1.0版本的文档。如果您想查阅其他版本的文档,可以点击页面右上角“切换版本”按钮进行切换。 ■ 如果您想使用最新版本,可以从梅卡曼德下载中心下载。 ■ 如果您不确定当前使用的产品是哪个版本,请随时联系梅卡曼德技术支持。 功能描述 该步骤可将输入的位姿变换至相机或桁架机器人坐标系,然后输出。 使用场景 该步骤用于桁架机器人工程的位姿坐标系变换。 若工程中使用的是非桁架机器人,需选择使用 位姿变换 步骤。 如果步骤选择错误,将导致转换后的位姿有误,并且可能输出错误的抓取点。 输入与输出 参数说明 变换类型 参数解释:该参数用于选择位姿变换的变换类型。 值列表:CameraToRobot、RobotToCamera CameraToRobot:已知物体在相机坐标系中的位姿 Pose1,当变换类型设置为CameraToRobot时,即可输出物体在桁架机器人坐标系中的位姿 Pose2。具体效果见 调节示例 。 RobotToCamera:已知物体在桁架机器人坐标系中的位姿 Pose1,变换类型设置为RobotToCamera时,即可输出物体在相机坐标系中的位姿 Pose2。具体效果见 调节示例 。 默认值:CameraToRobot 该页面是否有帮助? 我要反馈 感谢您的支持! 可以通过以下方式反馈意见: 社区 反馈表单 点云变换(桁架) 沿参考方向平移位姿