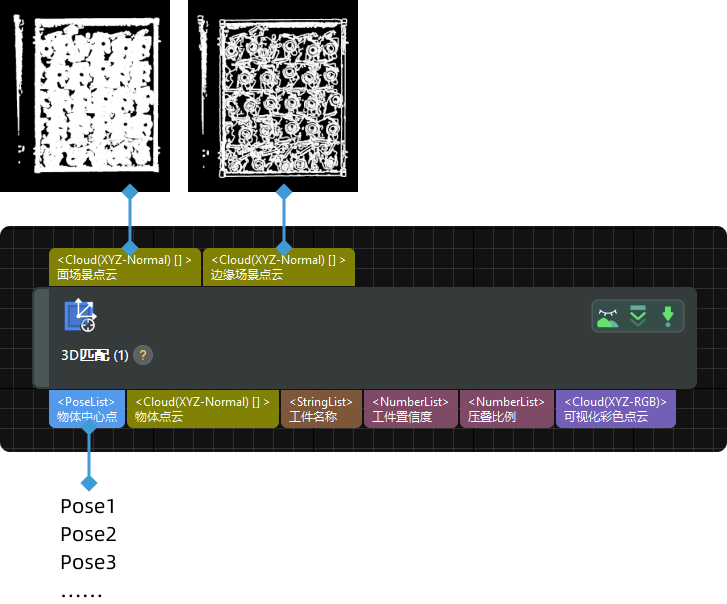
3D匹配
使用场景
该步骤适用于大部分需要对同一种物体的位姿进行粗匹配和精匹配的场景。
使用该步骤过程中,可参考“3D匹配”常见问题处理专题了解如何处理3D匹配过程中的常见问题。
参数说明
模板设置
- 模型选择
-
参数解释:该参数用于选择工件库中的点云模板。
调节说明:单击工件库按钮打开工件库,在工件库中完成点云模板制作后,可在按钮下方的下拉列表中进行选择。
参数调试等级
- 参数调试等级
-
参数解释:该参数用于对参数分级,不同类型用户看到的参数会有所差异,可参考下文选择合适的参数调试等级。
值列表:基础、高级、专家
默认值:基础
调参等级选择指引
下文提供参数调试等级的选择指引,你可以根据应用场景选择合适的等级进行配置。
基础等级
适用于快速部署和初步配置等场景。基础等级显示常用的关键参数,例如匹配模式和输出类型。当工件特征清晰、点云质量良好时,基础调试等级通常可以满足匹配需求。具体可调参数详见基础调试等级参数说明。
高级等级
适用于性能优化、精度提升、稳定性增强等场景。高级等级提供更多可调参数,例如粗匹配与精匹配的运行方式、调整或过滤粗匹配位姿、去除重叠/压叠物体位姿等。适合处理遮挡严重或多工件堆叠的情况,可提升匹配稳定性,并减少误检或漏检概率。具体可调参数详见高级调试等级参数说明。
专家等级
适用于深度调优、异常问题诊断及定制化匹配需求。专家等级显示所有可调参数,包括算法层面的控制项(如投票设置、位姿验证设置等),适合具备一定算法理解能力的技术人员。该等级常用于处理复杂或不稳定的匹配场景,例如工件反光或乱序情况。通常由梅卡曼德技术支持或其他资深技术人员使用。具体可调参数详见专家调试等级参数说明。