路径规划工具
本文主要介绍路径规划工具及其使用方法。
|
路径规划工具的功能与Mech-Viz相关,需安装Mech-Viz并获得软件许可,才能使用该工具。 |
|
路径规划工具与Mech-Viz在部分参数及使用方法方面存在差异。建议在使用时避免混淆两者的使用说明,尽量保持分开使用。 |
功能简介
路径规划工具用于规划机器人在工件附近的无碰撞运动路径。
机器人的运动路径本质是机器人末端工具完成任务时的移动路径,此外,机器人移动过程中,末端工具可能与工件或场景物体之间发生碰撞。因此,为了给路径规划和碰撞检测提供所需的各类资源及数据,需要建立机器人所在的场景、配置机器人末端工具、并输入视觉点和场景点云。通过路径规划工具,可导入这些资源和数据,完成碰撞检测及路径规划,并通过“路径规划”步骤输出机器人的运动路径,来控制机器人完成抓取等任务。
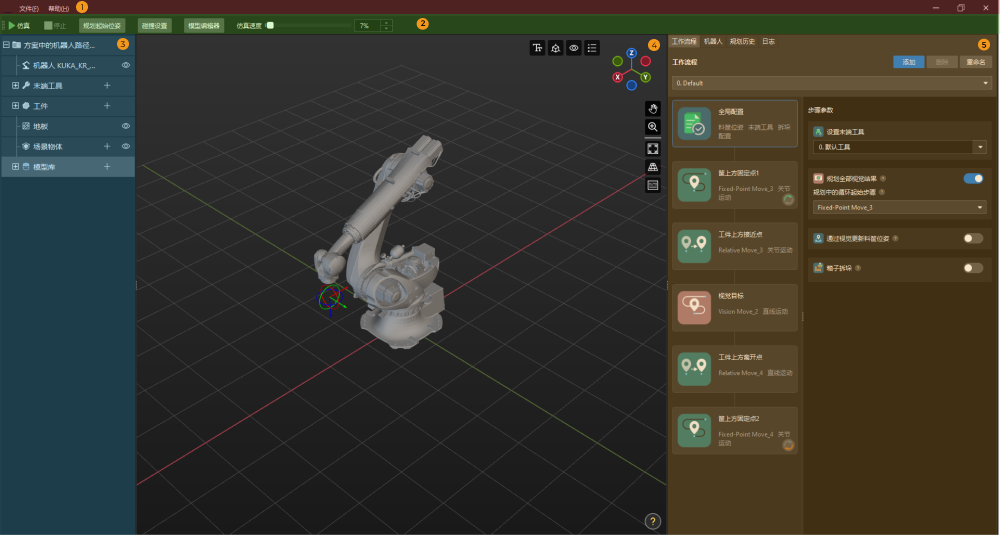
使用流程
在使用路径规划工具前,需先根据端口类型将路径规划步骤对应的输入、输出端口连接。
完成连接后,在路径规划步骤的参数栏中,单击 打开编辑器 ,在弹出的机器人模型选择窗口中,根据实际使用的机器人型号选择机器人模型,之后进入路径规划工具窗口。
路径规划工具的一般使用流程如下。单击以下链接,开始您的学习之旅。
配置工程所需的末端工具、工件、场景物体等资源。 |
|
以流程图形式搭建的机器人运动控制程序。 |
|
检测机器人运行路径中可能发生的碰撞。 |
|
使用仿真机器人运行调试工程。 |