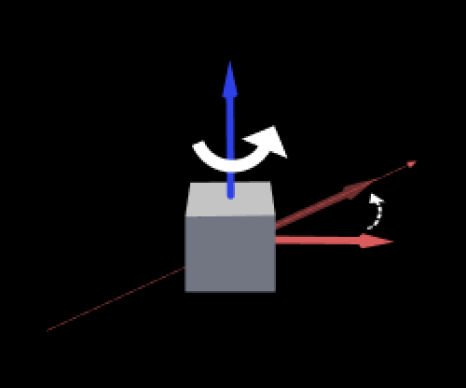
使位姿的轴旋转至指定方向
参数说明
可视化设置
| 参数 | 解释 |
|---|---|
位姿显示设置 |
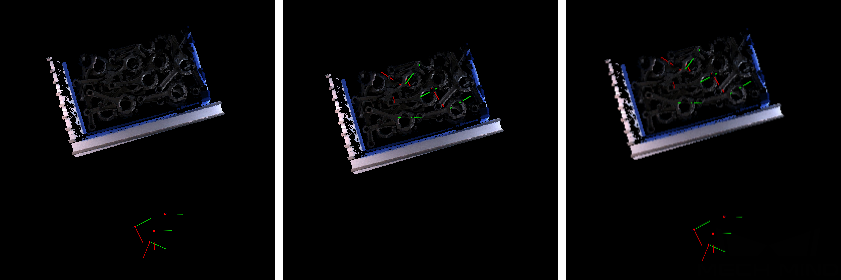
参数解释:该参数用于设置位姿的显示形式。 默认值:只显示输出位姿 值列表:只显示输出位姿、只显示输入位姿、输入与输出一同显示 调节说明:根据实际需求,在下拉列表中选择合适的位姿显示设置。具体效果见 调节示例 。 |
旋转设置
| 参数 | 解释 |
|---|---|
需要旋转的轴 |
参数解释:该参数用于指定需要指向目标方向的轴向。 值列表:X、Y、Z 默认值:Z |
需要固定的轴 |
参数解释:该参数用于指定旋转时固定不动的轴向,位姿将绕该轴进行旋转。 值列表:X、Y、Z、None 默认值:X 调节说明:选择具体轴向时,旋转结果将受该轴方向约束;选择 None 时,不对旋转过程施加轴向约束,位姿将自动旋转,使“需要旋转的轴”对齐到目标方向。 |
对称性设置
| 参数 | 解释 |
|---|---|
需要考虑物体对称性 |
参数解释:该参数用于指定在旋转过程中,是否考虑物体在旋转方向上的对称性。启用后,将绕目标轴旋转整数倍“对称角度”得到的所有方向视为相同,并从中选择与目标方向夹角最小的位姿作为输出。 默认值:勾选 调节说明:当工件在目标轴方向上具有周期性对称结构时,建议勾选该参数,以确保输出位姿在对称约束下尽可能接近目标方向。 |
对称角度(0~360) |
参数解释:该参数用于设置物体在目标轴向上的最小旋转对称角度。物体每绕着固定轴旋转该对称角度时,其方向视为相同。 默认值:180° 调节说明:该值应与实际工件的旋转对称结构一致。例如,对于具有 180° 旋转对称性的工件,可将该参数设置为 180°。 |