机器人绝对精度检查
本节介绍如何进行机器人绝对精度检查。
具体检查方法如下。
测量机器人移动距离误差
在工作区域内使用示教器控制机器人沿固定方向(例如 X、Y 方向)移动一段距离,移动完成后将该距离与机器人实际移动距离进行对比并测量差值。
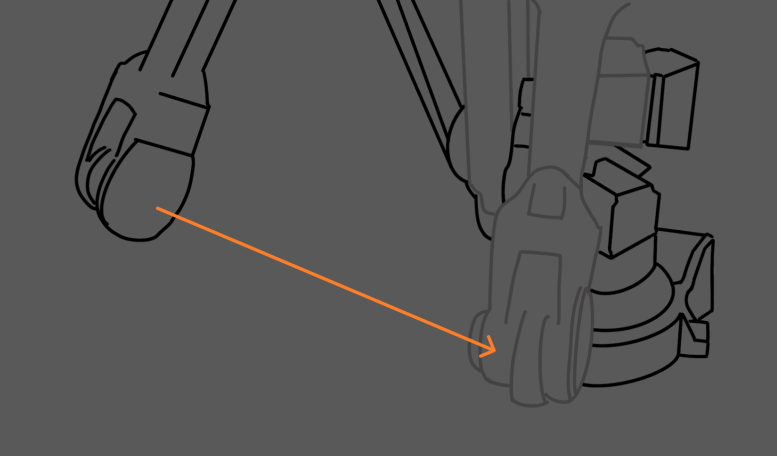
例如,使用示教器控制机器人沿 X 方向移动 1000 mm,然后测量机器人实际移动的距离,如机器人实际移动了 998 mm,则机器人移动距离误差为 2 mm。
使用围绕尖点旋转法进行检测
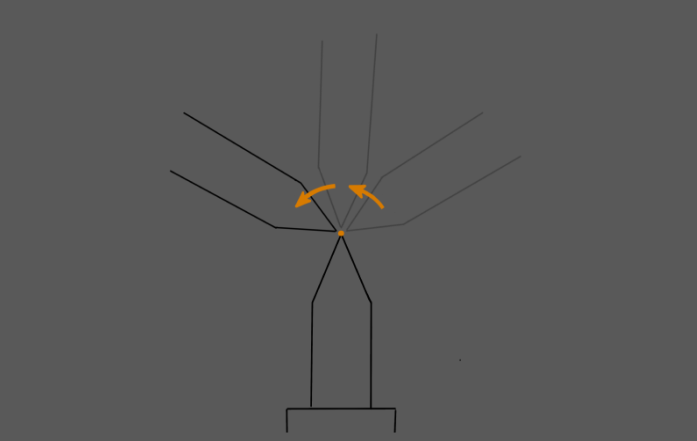
如上图所示,使用了围绕尖点旋转的方法对机器人绝对精度进行检查,具体操作说明如下。
-
在机器人法兰末端安装尖点。
-
将当前尖点 TCP 的坐标输入到示教器,作为机器人 TCP。
-
在工作区域中添加另一个尖点并将其固定好。
-
使用示教器移动机器人,使其尖点与工作区域中的尖点精准接触(尖对尖)。
-
使用示教器控制机器人以当前 TCP 为中心进行旋转,观察两尖点的重合情况和距离波动范围。
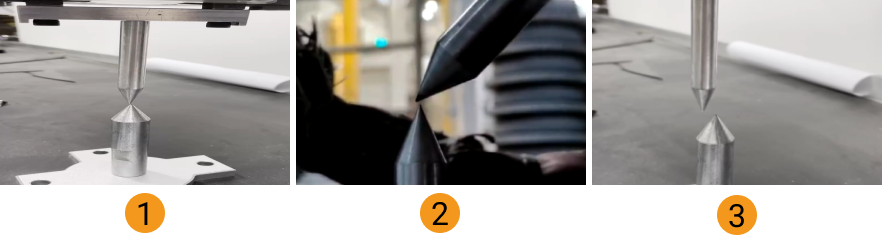
如下图所示,图 1 中机器人法兰末端尖点与另一尖点能够重合,表示机器人绝对精度良好;图 2 中机器人法兰末端尖点与另一尖点触碰时存在偏差,表示机器人绝对精度较差;图 3 中机器人法兰末端尖点与另一尖点触碰时存在较大的偏差,表示机器人绝对精度非常差。
其他检查方案
机器人绝对精度是影响识别和抓取精度的主要因素。当通过前序步骤检测到的机器人绝对精度无法满足需求时,请优先联系机器人厂家进行精度校正。
若机器人厂家无法进行精度校正或校正后精度仍然无法满足要求,可尝试在不同位置制作不同的点云模板,或示教不同的抓取点,来补偿机器人绝对精度。