标定球选型
本文指导你在部署视觉系统漂移校正方案前根据使用的相机来确定标定球数量和直径。
确定标定球直径后,可参考标定球使用说明了解标定球的使用说明,以及标定球维护与保养相关事项。
|
一般情况下,无论视觉系统中使用了何种型号的相机,均支持部署视觉系统漂移自校正方案。 若相机工作距离为 500 ~ 3000 mm,可直接选用 60 mm 直径的标定球。 若相机工作距离不在 500 ~ 3000 mm 范围内,请联系技术支持评估使用其他规格的标定球。 |
EIH 视觉系统漂移自校正
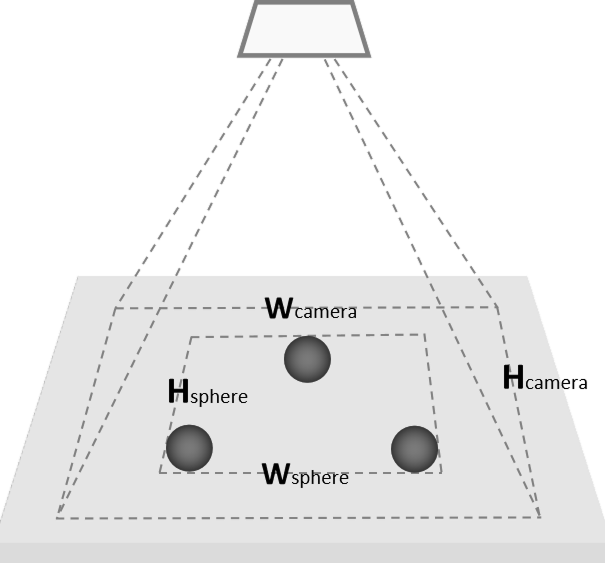
部署“EIH 视觉系统漂移自校正”方案前,需准备 3 个标定球,可根据下表了解如何根据相机型号和相机视野明确对应的标定球直径和标定球外接矩形尺寸。
| 相机型号 | 相机视野(mm) | 对应的标定球直径(mm) | 标定球外接矩形尺寸 Wsphere × Hsphere(mm) |
|---|---|---|---|
UHP-140 |
近端视野 135 × 90 @ 0.28m |
25.4 |
94 × 62 @ 0.28m |
远端视野 150 × 100 @ 0.32m |
25.4 |
105 × 70 @ 0.32m |
|
Welding |
近端视野 220 × 165 @ 0.25m |
25.4 |
154*115 @ 0.25m |
远端视野 770 × 550 @ 0.8m |
60 |
462 × 330 @ 0.8m |
|
NANO |
近端视野 220 × 150 @ 0.3m |
25.4 |
154 × 105 @ 0.3m |
远端视野 440 × 300 @ 0.6m |
60 |
308 × 210 @ 0.6m |
|
NANO ULTRA |
近端视野 220 × 165 @ 0.25m |
25.4 |
154 × 115 @ 0.25m |
远端视野 500 × 340 @ 0.5m |
60 |
300 × 204 @ 0.5m |
|
PRO S |
近端视野 370 × 240 @ 0.5m |
60 |
222 × 144 @ 0.5m |
远端视野 800 × 450 @ 1.0m |
60 |
480 × 270 @ 1.0m |
|
PRO M |
近端视野 800 × 450 @1.0m |
60 |
480 × 270 @1.0m |
远端视野 1500 × 890 @ 2.0m |
60 |
900 × 534 @ 2.0m |
|
LSR S |
近端视野 480 × 360 @ 0.5m |
60 |
288 × 216 @ 0.5m |
远端视野 1500 × 1200 @ 1.5m |
60 |
900 × 720 @ 1.5m |
|
对于标定球外接矩形边长与相机视野边长的比例,你可参考以下信息:
|
ETH 视觉系统漂移自校正
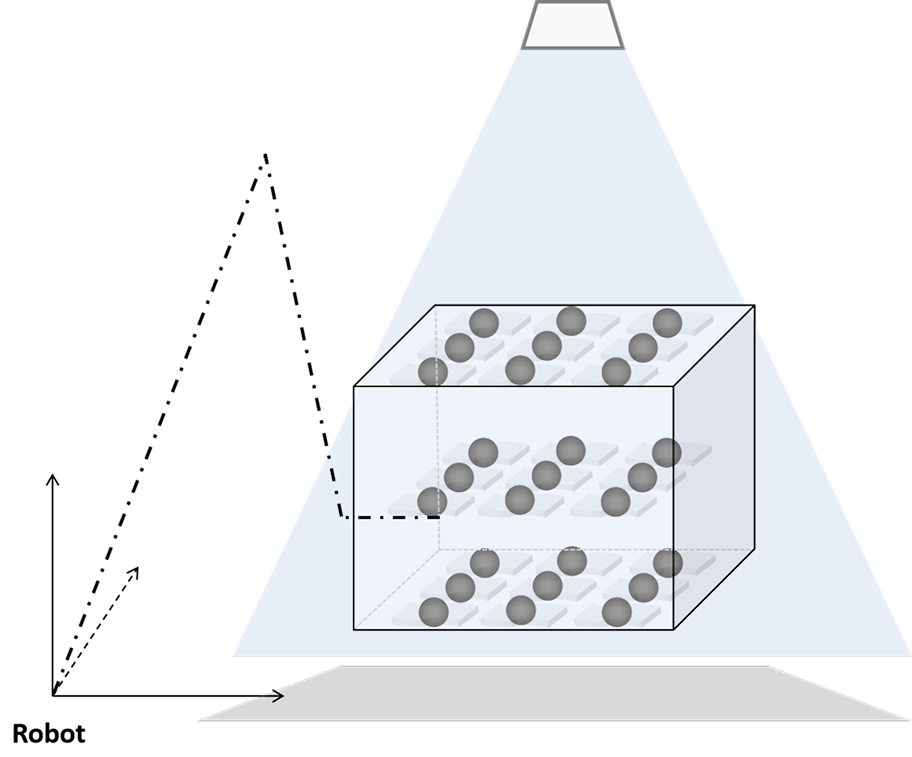
部署“ETH 视觉系统漂移自校正”方案前,需准备 1 个标定球,可根据下表了解如何根据相机型号和相机视野明确对应的标定球直径和标定球运动范围。
| 相机型号 | 相机视野(mm) | 对应的标定球直径(mm) | 机器人携带标定球时的运动范围 |
|---|---|---|---|
LSR S |
近端视野 480 × 360 @ 0.5m |
60 |
整个料筐空间 |
远端视野 1500 × 1200 @ 1.5m |
60 |
整个料筐空间 |
|
LSR L |
近端视野 1200 × 1000 @ 1.2m |
60 |
整个料筐空间 |
远端视野 3000 × 2400 @ 3.0m |
100 |
整个料筐空间 |
|
LSR XL |
近端视野 1280 × 1280 @ 1.6m |
60 |
整个料筐空间 |
远端视野 3000 × 2800 @ 3.5m |
100 |
整个料筐空间 |
|
DEEP |
近端视野 1200 × 1000 @ 1.2m |
60 |
整个料筐空间 |
远端视野 3500 × 2800 @ 3.5m |
100 |
整个料筐空间 |