相机安装支架设计
相机支架形式
不同的相机安装方式使用不同的安装支架,详情见下表。
Eye to hand安装支架 |
铝型材支架 方管支架 滑动相机支架(水平) 垂直移动式相机支架 |
|---|---|
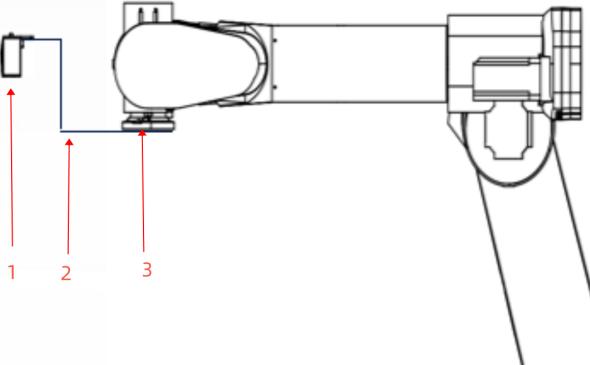
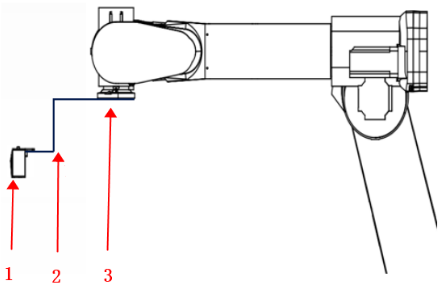
Eye in hand安装支架 |
相机高于机器人J6轴法兰 相机低于机器人J6轴法兰 |
各种形式的支架设计要求及适用场景,详见Eye to hand安装支架的设计与安装和Eye in hand安装支架的设计与安装。
Eye to hand安装支架的设计与安装
| 在Eye to hand安装支架的设计过程中,需要考虑在立柱表面布置线槽,方便相机线缆的走线。 |
方管支架设计(推荐方式)
使用方管支架时,需使用国标空心方管进行焊接。空心方管具有较高的强度和稳定性,能够提供坚固的支撑框架。支架的设计形式可以根据实际情况选择单立柱或龙门形式。具体形式及要求如下:
-
单立柱支架设计
适合周围没有明显震动的环境。它具有结构简单、安装方便的特点。
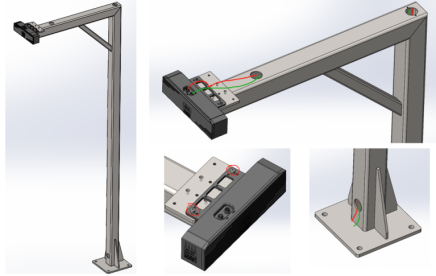
设计要求:
-
方钢规格不低于100*100*5。
-
建议采用整体焊接成型。
-
相机支架横梁及立柱都应设置必要的斜撑和肋板。
-
-
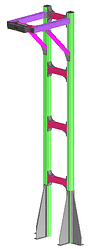
龙门支架设计
适合有明显的震动的环境。龙门形式可提供更稳固的支撑结构,能够更好地抵抗外界震动和冲击,保证相机的稳定性。

滑动相机支架的设计
适用范围:相邻垛位共用同一台相机。
根据动力元件的不同,滑动相机支架可以分为:伺服模组式支架和气缸式支架。
-
伺服模组式支架
伺服模组式支架要求运行平稳,停止和启动无冲击,推荐正常运行速度≤250 mm/s。伺服模组式构成如下图所示:1-支架本体、2-模组安装板、3-相机安装板、4-相机、5-伺服模组、6-拖链安装板和7-拖链。
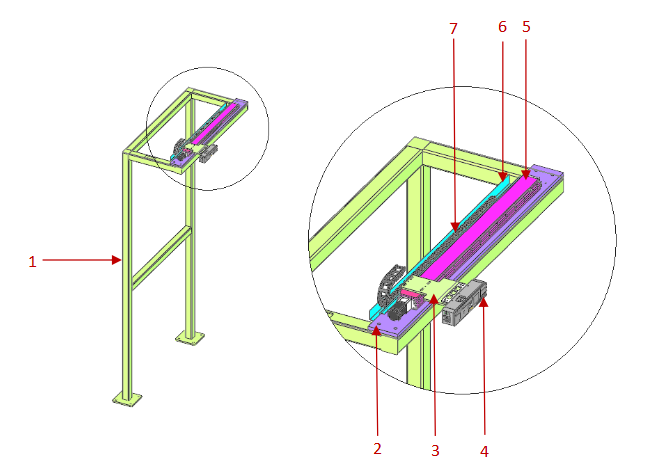
支架本体: 采用100*100方钢焊接而成。对于支架整体较高的场景可以增加斜撑或其他固定方式。 模组安装板和相机安装板:足够的强度和刚性,确保伺服模组工作时相机的稳定性。 伺服模组:伺服模组重复定位精度一般可以分为±0.01 mm、±0.02 mm、±0.05 mm、±0.1 mm、±0.2 mm等,可以根据实际项目精度需要选择合适精度的直线伺服模组,驱动部分推荐使用伺服电机。 拖链:拖链根据总线缆直径选择标准的市购件,一般要求总线缆所占横截面积小于拖链内部容积的60%~80%。 拖链安装板:根据要求采用钣金折弯。
-
气缸式支架(不推荐方案)
气缸的定位精度要略低于伺服模组,一般精度可以达到±0.1 mm。要求气缸式支架运行平稳,停止和启动无冲击,正常运行速度推荐≤200 mm/s。气缸式支架构成如下图所示:1-支架本体、2-气缸安装板、3-相机安装板、4-相机、5-气缸、6-拖链安装板和7-拖链。
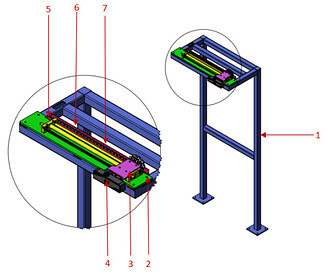
气缸:根据实际现场垛位距离选择气缸行程。气缸类型建议选择导杆气缸,否则务必配合直线导轨使用。另外注意气缸必须配合油压缓冲器+限位块使用,此外气缸应配备排气节流阀。支架本体、气缸安装板、相机安装板、拖链安装板和拖链的设计和选型可参考伺服模组式支架。
考虑到气缸冲击、整体运行精度、相机在停靠位置震动及长期稳定性,不推荐该方式。
垂直移动式相机支架设计
适用范围:垛型较高或垛型长宽尺寸过大、垛型底层麻袋点云较差。
垂直式相机支架按驱动力的不同分为:气动垂直移动相机支架和电动垂直移动相机支架。
-
电动垂直移动相机支架
设计要求:相机支架运行平稳,工作中无剧烈冲击;移动速度小于250mm/s,移动机构运行平稳流畅。此外相机支架要具有足够的刚性,保证在工作过程中不出现震动。电动垂直移动相机支架构成如下图所示:1-支架本体、2-3D相机、3-相机安装板、4-齿轮齿条组件、5-拖链和6-坦克链安装板。
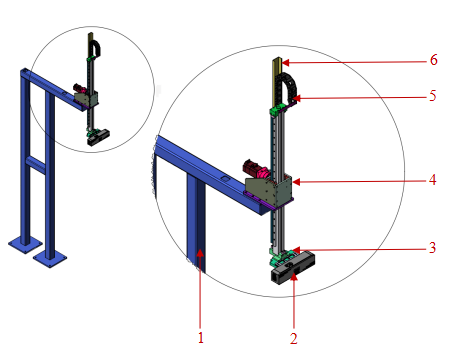
齿轮齿条组件:建议选择抱闸式电机,防止意外断电后相机自由落体式掉落。
-
气动垂直移动相机支架(不推荐方案)
设计要求:相机支架运行平稳,工作中无剧烈冲击;移动速度小于200mm/s,移动机构运行平稳流畅;此外相机支架有足够的刚性,保证在工作过程中不出现震动。气动垂直移动相机支架构成如下图所示:1-支架本体、2-相机安装板、3-3D相机、4-拖链、5-无杆气缸和6-拖链安装板。
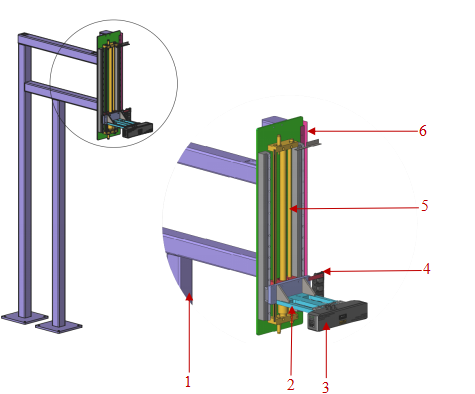
气缸:根据实际现场垛位距离选择气缸行程。此外注意气缸必须配备油压缓冲器和限位块,并且应配备排气节流阀。选择中封式控制气缸换向阀,保证断气后相机不会因重力而产生自由落体运动。
考虑到气缸冲击、整体运行精度、相机在停靠位置震动及长期稳定性,不推荐该方式。