Get JPs
Function
This Step is used to obtain the current joint positions of the connected robot and synchronize the joint positions to Mech-Viz.
Usage Scenario
If Mech-Viz does not fully control all movements of the robot, you can use this Step to obtain the current joint positions of the robot after it has moved according to its control program.
Application Examples
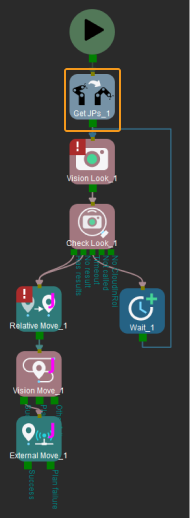
Before the Visual Recognition Step triggers the corresponding Mech-Vision project, Mech-Viz obtains the joint positions of the real robot through the Get JPs Step and uses the obtained joint positions as the starting position for path planning.