Point Filter
Function
This Step can filter points from a point cloud based on user-defined rules. Points that do not meet the rules will be filtered out.

Usage Scenario
This Step is usually used in the point cloud preprocessing phase. It helps remove outliers and unwanted points to prepare for subsequent clustering operations.
Parameter Description
This Step provides two methods for filtering points in the point cloud:
-
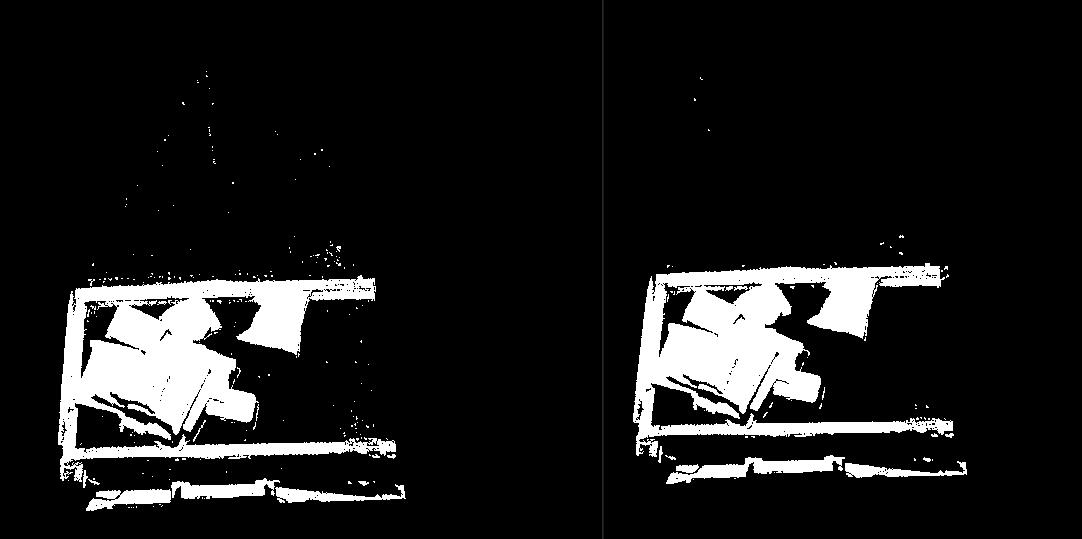
StatisticalOutlierFilter: A statistical filter that removes points out of the range according to the given parameters. This method is recommended when the point cloud has obvious outliers, as shown below.
-
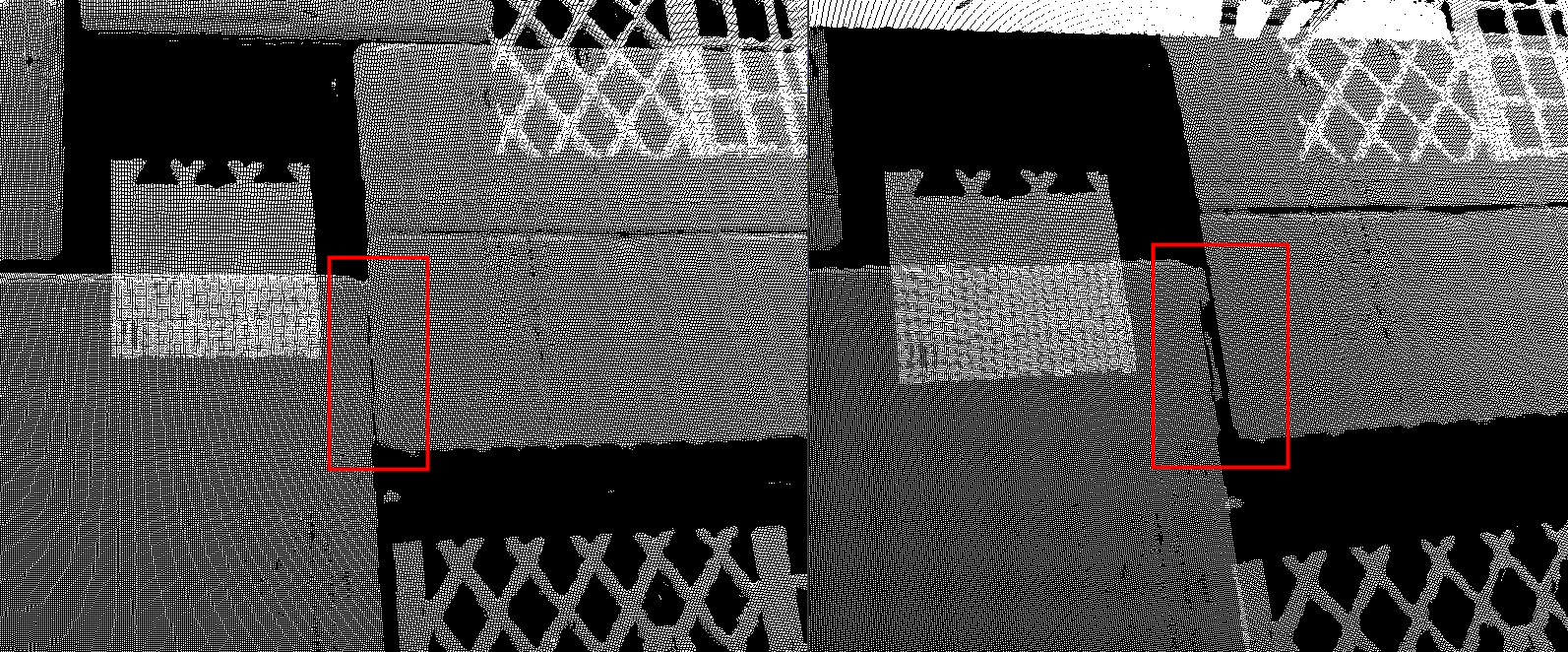
NormalsFilter: A normal filter that calculates the angle between each point in the point cloud and the reference direction according to the reference direction. Points out of the range will be filtered out. It is recommended to be used when point clouds need to be layered to avoid conglutination, as shown in the red box below.
The following sections introduce the parameters for each method.
StatisticalOutlierFilter
| Parameter | Description | ||
|---|---|---|---|
Mean K |
Description: This parameter specifies the number of nearby points for each search. A larger value increases the number of neighboring points used to calculate the mean distance, resulting in stronger filtering but a higher risk of removing fine details from the point cloud. A smaller value may lead to insufficient filtering.
|
||
Standard Deviation Multiplier |
Description: This parameter specifies the threshold for determining outliers. A smaller value enforces stricter filtering thresholds, resulting in more points being removed. A larger value applies more relaxed conditions, allowing more points to be retained. Default value: 2.0000 Tuning recommendation: It is recommended to use the default value.
|
NormalsFilter
Reference Direction Settings
| Parameter | Description |
|---|---|
Use Robot Z in Camera |
Instruction: This parameter determines whether to use the Z-axis of robot in the camera as the reference direction. If it is selected, the Align X, Align Y, and Align Z values are invalid.
|
Align X/Y/Z Values |
Instruction: This parameter is used to determine the reference axis of normal filtering. A vector consisting of X, Y, and Z parameters sets the direction of the reference axis. When Use Robot Z in Camera is selected, the three parameters are invalid and the reference axis is robot Z-axis.
|
Angle Threshold Settings
| Parameter | Description |
|---|---|
Min Angle |
Description: This parameter is used to control the lower limit of the angular difference in degrees (°) in the process of point filtering. When the angular difference between the normal vector of a point and the reference direction is below this threshold, the point will be filtered out.
|
Max Angle |
Description: This parameter is used to control the upper limit of the angular difference in degrees (°) in the process of point filtering. When the angular difference between the normal vector of a point and the reference direction exceeds this threshold, the point will be filtered out.
|