Transform Point Clouds for Truss
Function
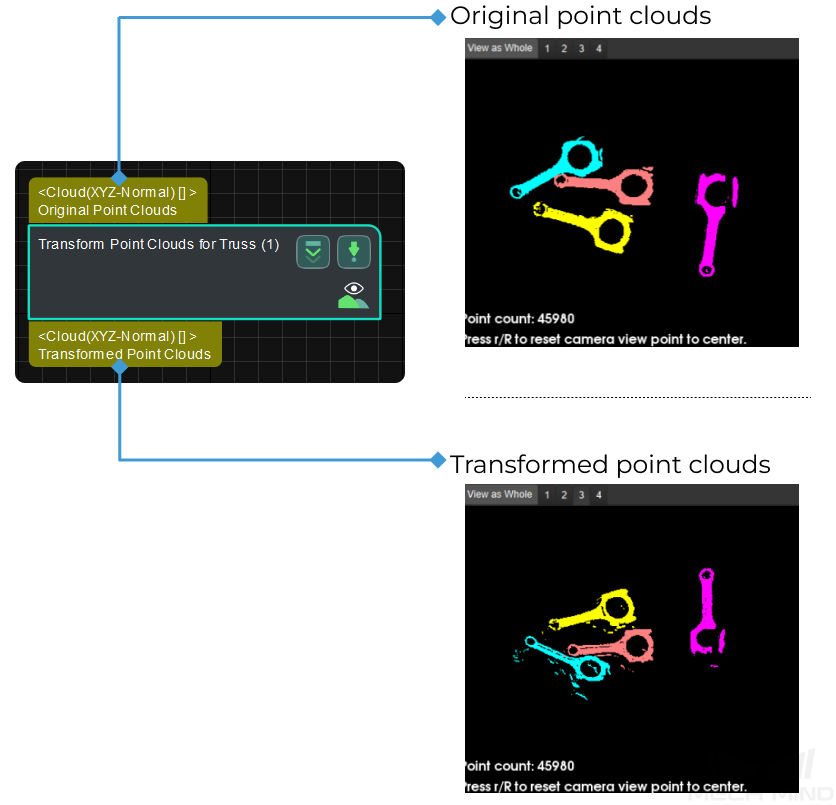
This Step is used to transform the input point clouds to the camera reference frame or the truss system reference frame and then output the transformed point clouds.
Usage Scenario
This Step is designed to transform the reference frame of point clouds in automated truss system projects.
|
If you are using a robot other than the automated truss system, please use the Transform Point Clouds Step. If you use the wrong transform Step, the position of the point cloud after the transformation will be incorrect, and therefore incorrect pick points will be output. |
Parameter Description
- Transformation Type
-
Parameter description: This parameter is used to select the type of point cloud transformation.
Options: CameraToRobot, RobotToCamera.
-
CameraToRobot: Transform the point clouds from the camera reference frame to the truss system reference frame. Please refer to the tuning example for the corresponding result.
-
RobotToCamera: Transform the point clouds from the truss system reference frame to the camera reference frame. Please refer to the tuning example for the corresponding result.
Default setting: CameraToRobot.
-