Run the Simulated Robot
Simulate the robot and its operation process in a virtual environment. Through the simulation of the robot motion and environment interaction, etc. on the software, we can verify motion trajectories, optimize the path planning and predict the risk of collision.
Mech-Viz software supports two forms of simulated robots:
-
Run the simulated robot with the vision service (default).
-
Run the simulated robot with the vision records
Run the Simulated Robot with the Vision Service
After building a workflow, you can simulate a robot motion to verify the feasibility of the workflow.
Click Simulate to run the simulated robot. Click the Stop button to make it stop.
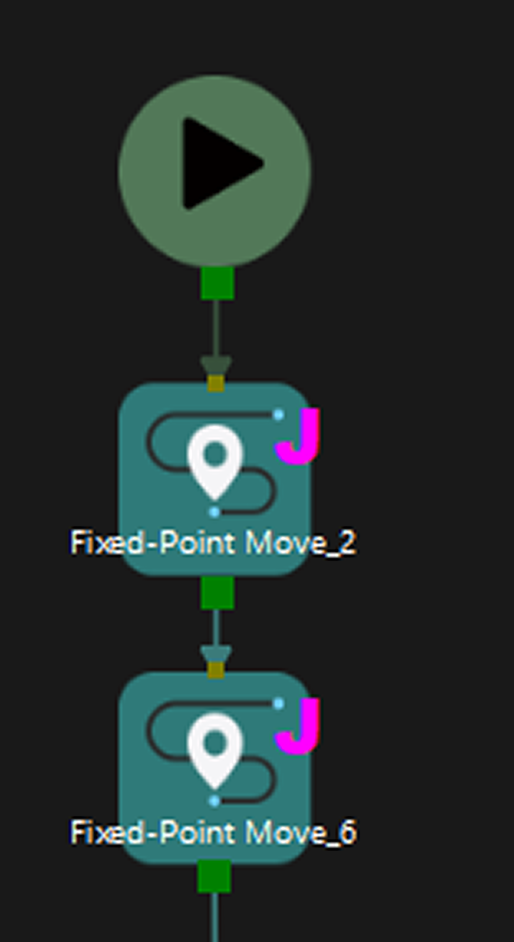
Workflow |
Simulation |
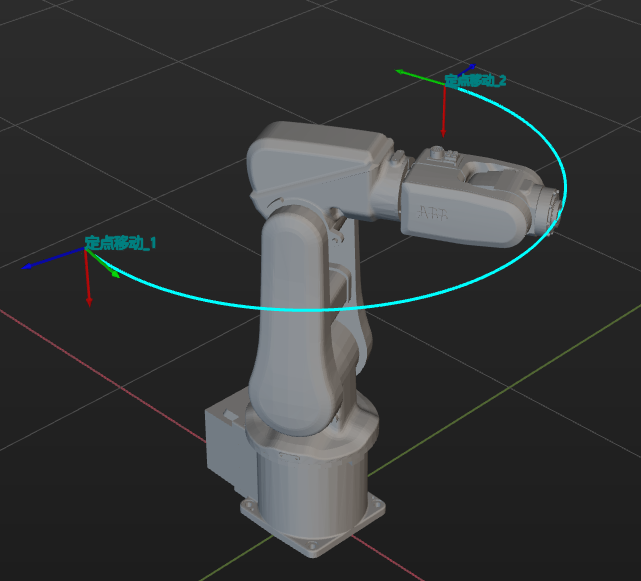
|
|
Run the Simulated Robot with the Vision Records
If you have saved vision records, you can directly run a simulated Mech-Viz project without running the Mech-Vision project in the same solution, so as to reproduce the simulation effect for troubleshooting or demonstration.
If you need to use vision records for simulation, click the ![]() on the right of the Simulate and select use vision records.
on the right of the Simulate and select use vision records.
For detailed instructions, please refer to Save and Use Vision Records.