Teach Target Object Pose
When you want to pick target objects with multiple picking methods, and the target objects must be placed in a fixed pose, you can teach the placing waypoint directly in Mech-Viz, so as to ensure accurate placements of target objects in the desired pose.
Application Example
For example, when small parts have multiple feasible pick points, they can be picked in various ways. However, the target objects need to be placed on the transfer platform in a specific pose, so the target object pose during placement must remain consistent.
Operation Procedures
There are differences in the procedure for teaching the target object pose between the Master-Control communication mode and the Standard Interface communication mode. Please refer to the corresponding procedure for operation.
Procedure for teaching target object poses in Master-Control communication mode
In Master-Control communication mode, follow the steps below to teach the target object pose:
-
Ensure the established workflow can master-control the robot to pick the target object successfully.
-
Ensure the robot, holding the target object, has reached the target placement position.
-
Check and make sure that the simulated robot pose is consistent with the real robot pose. If not, click the Sync Robot button in the toolbar.
-
Select the “Fixed-Point Move” Step used as the placing point in the workflow, and then click the Teach target object pose button in the lower parameter panel.
-
After clicking Yes in the pop-up window, the waypoint type of the placing waypoint will be switched to the target object pose. By now, the teaching of the target object pose has been finished.

Procedure for teaching target object pose in Standard Interface communication mode
In Standard Interface communication mode, follow the steps below to teach the target object pose on the robot side and synchronize the waypoints in the robot program with those in the Mech-Viz workflow:
-
Run the robot picking program and verify that the robot successfully picks up the target object along the planned path output by Mech-Viz.
-
Jog the robot holding the target object to its placement position.
-
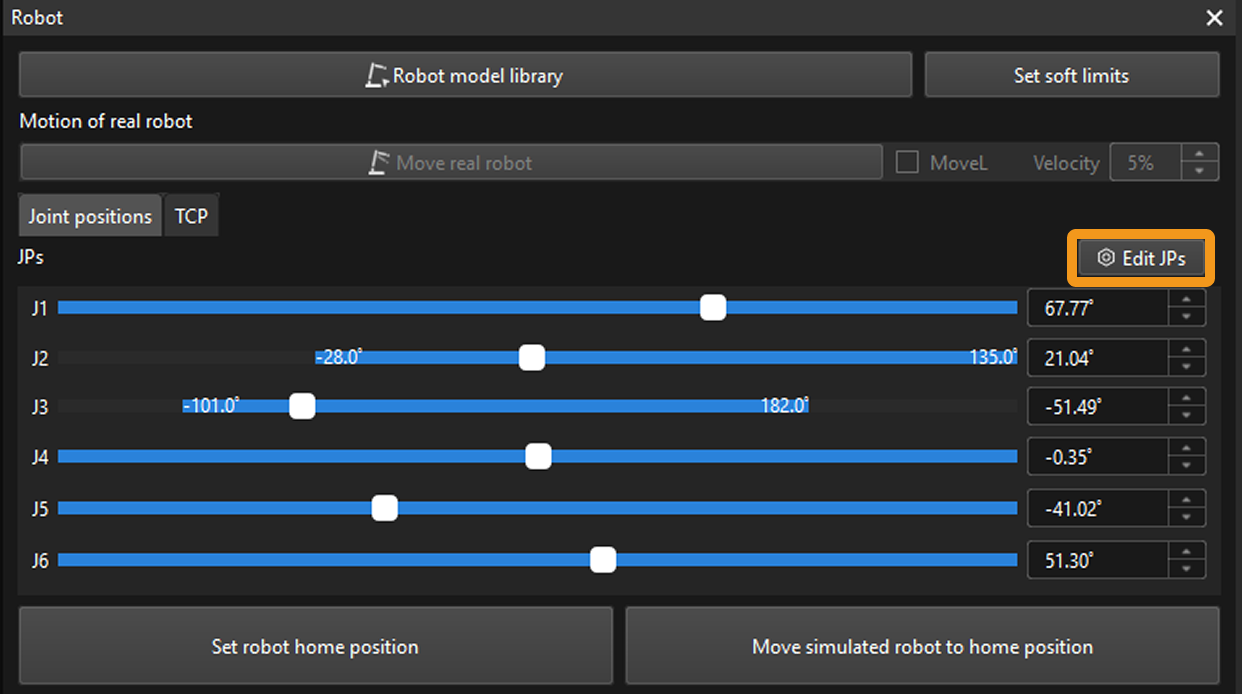
In the Robt functional panel, click Edit JPs button, and enter the JPs read from the teach pendant to make sure the simulated robot pose is consistent with the real robot pose.
-
Select the “Fixed-Point Move” Step used as the placing point in the workflow, and then click the Teach target object pose button in the lower parameter panel.
-
After clicking Yes in the pop-up window, the waypoint type of the placing waypoint will be switched to the target object pose.