Move Poses to Point Cloud Surfaces along Z-Axis
Function
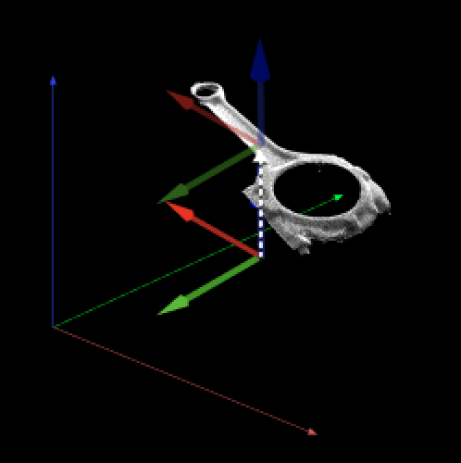
This Step moves poses along the Z-axis of a specified coordinate system to point cloud surfaces according to user-set rules.
Usage Scenario
This Step is generally used to adjust poses that are not on object surfaces. Causes include tilted target objects and concave or convex surfaces. This Step is usually used after the Calc Poses and Dimensions from Planar Point Clouds Step.
Input and Output
Parameter Description
Visualization Settings
| Parameter | Description | ||||
|---|---|---|---|---|---|
Show Point Cloud In Selected Frame |
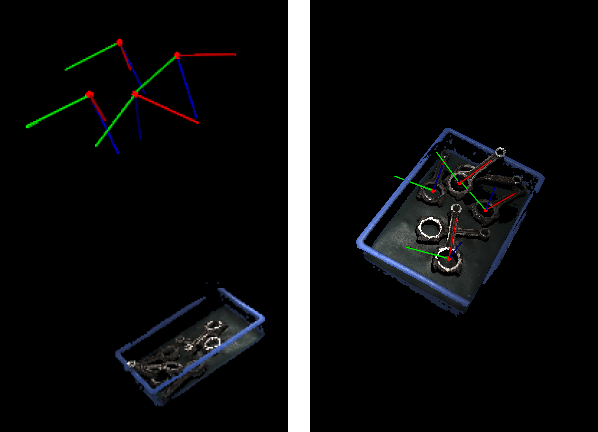
Description: Display point cloud under the robot reference frame or the camera reference frame. Default value: Robot Coordinate Value list: Robot Coordinate, Camera Coordinate Instruction: When this parameter is set to Robot Coordinate, the Debug Output panel will display the visualized output under the camera reference frame; when it is set to Robot Coordinate, the panel will display the visualized output under the robot reference frame. Please refer to the tuning example for the corresponding result.
|
||||
Pose Type to Visualize |
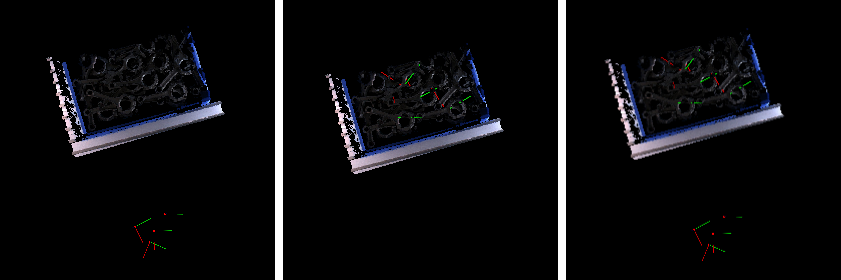
Description: This parameter is used to select the pose type to visualize.
|
Cloud Capturing Settings
| Parameter | Description |
|---|---|
Radius of XOY Plane |
Parameter description: Set the distance from the pose origin to the search range boundary in the XOY plane, measured in millimeters (mm).
|
Adjustment Settings
| Parameter | Description |
|---|---|
Adjustment Settings |
Parameter description: Set the algorithm or sorting mode for pose Z-axis movement. Value list:
Instruction: Different adjustment settings will affect the options available in the “Reference Z-Axis” and “Select Z Value” parameters. |
Reference Z Axis |
Parameter description: Set the coordinate system reference for distance calculation. Value list:
Instruction: This parameter is only available when "Adjustment Setting" is enabled. Selecting different reference coordinate systems affects the distance calculation results between poses and point clouds. |
Calculation Settings
| Parameter | Description |
|---|---|
Selected Z Value |
Parameter description: Set the Z coordinate value selected from the point cloud as the target movement height for poses. Value list:
Instruction: Available options depend on the selection in "Adjustment Setting". The specific meaning of this parameter varies based on "Adjustment Setting" and "Reference Z Axis" settings. |