General Settings
After target object recognition, you can configure auxiliary functions other than visual recognition. Only configuring port outputs is supported.
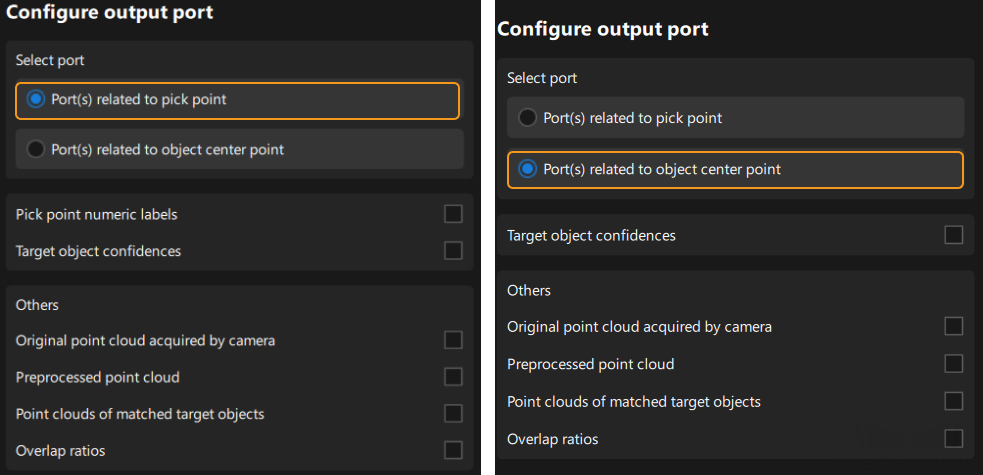
You can select the output ports according to the actual situation of the target object.
-
Select the output port type.
-
Port(s) related to pick point: Suitable for target objects with multiple pick points that need to be filtered.
-
Port(s) related to object center point: Suitable for symmetrical target objects that require orientation adjustment of the object center point.
-
-
Select specific output ports.
After selecting the output port type, you can select specific output ports according to the actual requirement.
For other output ports, select to add them in real time to the “3D Target Object Recognition” Step.
-
Original point cloud acquired by camera: Outputs the transformed colored point cloud. This option can be enabled based on actual requirements.
-
Preprocessed point cloud: Ready for direct use in subsequent Steps (e.g., bin recognition), avoiding redundant processing.
-
Point clouds of matched target objects: Provide data for pose offset compensation or subsequent error-proofing mechanisms.
-
Overlap ratios: Used to evaluate recognition confidence and optimize the picking sequence in the Adjust Poses V2 Step using the method of sorting by pose confidence.
-
Deep learning visualization result: Used to view the inference output of the deep learning model.
-
|
For the Deep learning visualization result output port, you can select it after enabling Assist recognition with deep learning. Make sure you click the Save button after the port is selected; otherwise, the port will not be added to the “3D Target Object Recognition” Step. |
Now you have completed the configuration in the 3D Target Object Recognition tool. Click the Save button to save the configuration.