Apply Masks to Point Cloud
Function
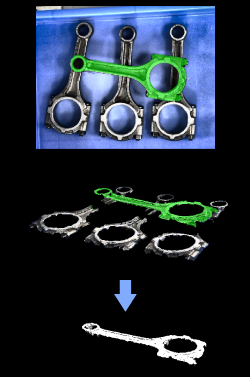
The Step applies the mask to the point cloud. Points covered by the mask will be kept while points outside the mask will be eliminated.
Usage Scenario
This Step is usually connected after the Step Instance Segmentation to extract point clouds that are within the mask.
Input and Output
Input
| Input port | Data type | Description |
|---|---|---|
Mask Images |
Image/Color/Mask[] |
Mask images used to extract point clouds are input to this port. |
Original Point Cloud |
PointCloud/XYZ-Normal[] |
Point cloud to be processed is input to this port. |
Labels |
String[] |
Labels corresponding to masks (optional). |
Confidences |
Number[] |
Confidences corresponding to masks (optional). |