3D Coarse Matching V2
Function
This Step coarsely matches the point cloud model with the original point clouds and outputs the coarsely calculated candidate poses of the target objects.
Usage Scenario
This Step is usually used to detect the target object in the scene point cloud and obtain approximate candidate pose. This Step is usually used in conjunction with the 3D Fine Matching Step.
Input and Output
Parameters
| Parameter | Description |
|---|---|
Parameter Tuning Level |
Parameter description: This parameter is used to select the Parameter Tuning Level for the Step.
|
Basic Parameter Tuning Level
Model Settings
| Parameter | Description |
|---|---|
Select Target Object |
Description: This parameter is used to select the target object that is configured in the target object editor.
|
Matching Method
| Parameter | Description |
|---|---|
Matching Method |
Parameter description: This parameter is used to select the matching mode for 3D coarse matching.
|
Preprocessing Settings
| Parameter | Description |
|---|---|
Auto-Calculate Expected Point Count |
Parameter description: This parameter is used to determine whether to automatically calculate the point count of the down-sampled point cloud. Once this option is selected, the point count of the down-sampled point cloud will be calculated automatically. If it is not enabled, you need to manually specify “Expected Point Count of Sampled Model.”
|
Expected Point Count of Sampled Model |
Parameter description: This parameter is used to set the expected number of points in the point cloud model after downsampling. The lower this value is, the fewer points there are in the downsampled point cloud, and the lower the matching accuracy is.
|
Point Count Upper Threshold of Sampled Input Point Cloud |
Parameter description: This parameter is used to set the maximum number of points in the scene point cloud after downsampling. If the number of points in the scene point cloud after downsampling exceeds this value, the scene point cloud will be ignored, and empty data will be output.
|
Pose Verification Settings
| Parameter | Description |
|---|---|
Expected Number of Detected Poses per Input Point Cloud |
Parameter description: This parameter is used to set the expected number of matched poses for each input point cloud.
|
Advanced Parameter Tuning Level
Model Settings
| Parameter | Description |
|---|---|
Select Target Object |
Parameter description: This parameter is used to select the target object configured in the target object editor (project folder/resource/3d_matching).
|
Matching Method
| Parameter | Description |
|---|---|
Matching Method |
Parameter description: This parameter is used to select the matching mode for 3D coarse matching.
|
Preprocessing Settings
| Parameter | Description |
|---|---|
Auto-Calculate Expected Point Count |
Parameter description: This parameter is used to determine whether to automatically calculate the point count of the down-sampled point cloud. Once this option is selected, the point count of the down-sampled point cloud will be calculated automatically. If it is not enabled, you need to manually specify “Expected Point Count of Sampled Model.”
|
Expected Point Count of Sampled Model |
Parameter description: This parameter is used to set the expected number of points in the point cloud model after downsampling. The lower this value is, the fewer points there are in the downsampled point cloud, and the lower the matching accuracy is.
|
Point Count Upper Threshold of Sampled Input Point Cloud |
Parameter description: This parameter is used to set the maximum number of points in the scene point cloud after downsampling. If the number of points in the scene point cloud after downsampling exceeds this value, the scene point cloud will be ignored, and empty data will be output.
|
Number of Neighboring Points |
Parameter description: This parameter is used to set the number of neighboring points for calculating the orientation of each point. This parameter is only available in the Edge matching mode.
|
Voting Settings
| Parameter | Description |
|---|---|
Upper Limit of Point Pair Count per Feature |
Parameter description: This parameter specifies the upper limit of the number of point pairs contained in each feature during the model analysis. The lower this value is, the faster the execution will be, but the accuracy is also lower.
|
Distance Quantification |
Parameter description: This parameter is used to quantify the distance between points in the object point cloud. Distance Interval = Distance Quantification × Sampling Step. The greater this value is, the less accurate the matching result tends to be.
|
Angle Quantification |
Parameter description: This parameter is used to quantify the angle between the normals of the points in the object point cloud. Angle Interval = 360°/Angle Quantification. The greater this value is, the smaller the angle interval will be, and therefore the higher the accuracy of the matching result is, but a point cloud of higher quality is required.
|
Vote Ratio Lower Threshold |
Parameter description: Poses with scores higher than the “Highest Score in the Vote × Vote Ratio Lower Threshold” will go through pose verification. The lower this value is, the more poses are used for pose verification, and therefore the more likely an exact match will be found, but the Step will also take longer to execute.
|
Referring Point Sampling Step |
Parameter description: This parameter is used to adjust the step size to downsample the referring point. The step size is taken as an interval sampling point from the point cloud. When the value is larger, the interval sampling points are fewer, and the execution speed is faster, but the matching accuracy is reduced.
|
Referred Point Sampling Step |
Instruction: This parameter is used to adjust the step size to downsample the referred point. The step size is taken as an interval sampling point from the point cloud. When the value is larger, the interval sampling points are fewer, and the execution speed is faster, but the matching accuracy is reduced.
|
A referring point and a referred point make up a point pair. The larger the sampling step is, the fewer referring points and referred points there are after downsampling, the fewer the number of point pairs is, and the faster the execution is. |
Pose Filtering Settings
| Parameter | Description |
|---|---|
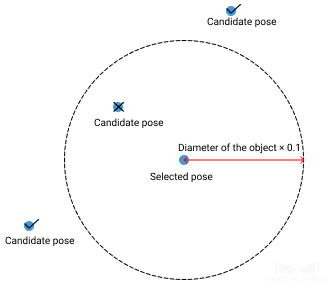
Use Distance NMS |
Parameter description: After this feature is enabled, candidate poses whose distances to the selected poses are less than 0.1 times the diameter of the object will be filtered out.
|
Filter Poses by Model Rotation Angle |
Instruction: In the Edge Matching mode, the point cloud model may need to be rotated by a certain angle to match with the scene point cloud, and the posed will be filtered by the point cloud model’s rotation angle. When the model’s rotation angle exceeds the Angle Difference Upper Threshold, the pose will be filtered out.
|
Angle Difference Upper Threshold |
Instruction: See the tooltip of Filter Pose by Model Rotation Angle.
|
Pose Verification Settings
| Parameter | Description |
|---|---|
Expected Number of Detected Poses per Input Point Cloud |
Parameter description: This parameter is used to set the expected number of matched poses for each input point cloud.
|
Voxel Length Generation Strategy |
Parameter description: This parameter is used to select the strategy to generate the voxel length.
|
Voxel Length Lower Limit |
Parameter description: This parameter is used to set the minimum voxel length in millimeters.
|
Voxel Length Upper Limit |
Parameter description: This parameter is used to set the maximum voxel length in millimeters.
|
|
If you divide the space occupied by the point cloud into a 3D grid, each minimum cube in this grid is a voxel. Voxel length is the length of the cube edge. |
Result Visualization
| Parameter | Description |
|---|---|
Visualization Options |
Parameter description: This parameter is used to select the item that you want to visualize.
|
Tuning Examples
Examples in the Basic Parameter Tuning Level
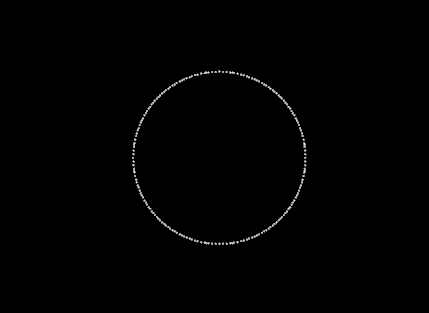
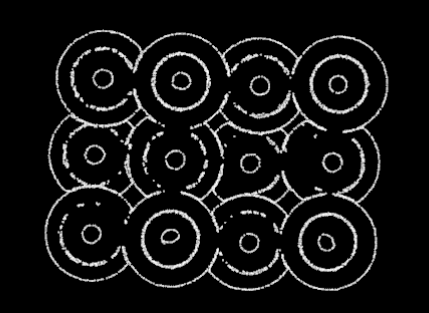
Expected Point Count of Sampled Model
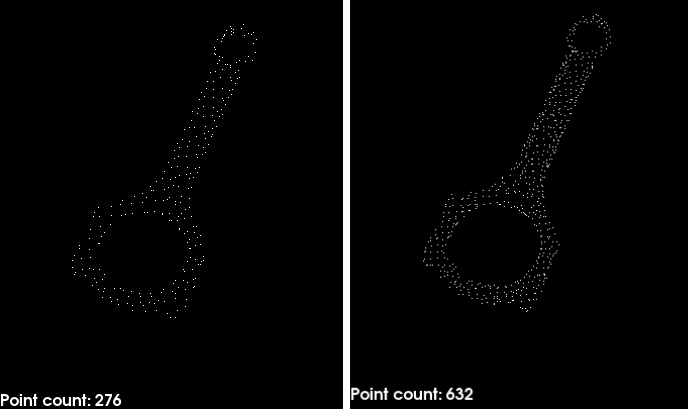
In the case of a connecting rod picking project, when the Expected Point Count of Sampled Model is set to 300 and 600, the corresponding point cloud models after downsampling are shown in the left and right figures below, respectively.
As you can see in the figures, the points in the left point cloud are sparse while the points in the right point cloud are dense.
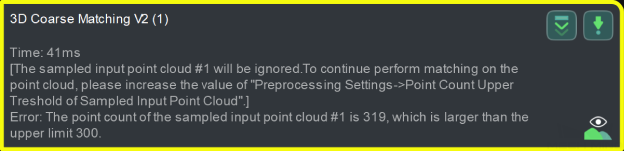
Point Count Upper Threshold of Sampled Input Point Cloud
When the number of points in the input point cloud exceeds the set value, a message as shown below will appear.
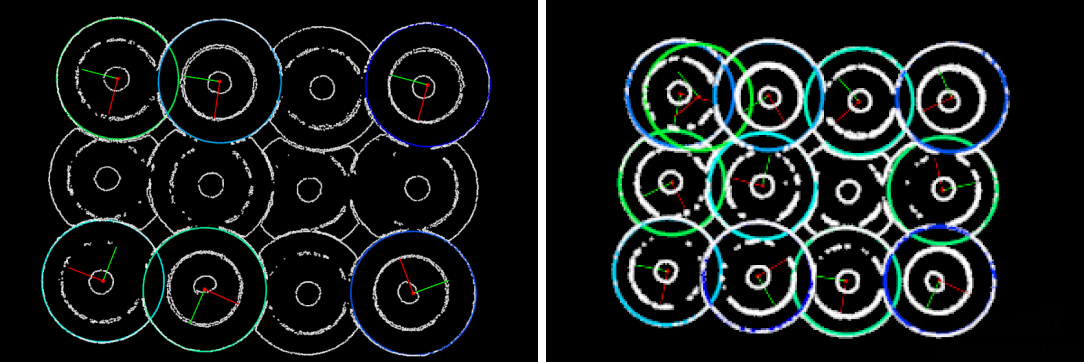
Expected Number of Detected Poses per Input Point Cloud
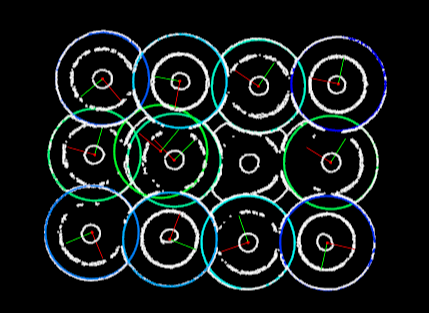
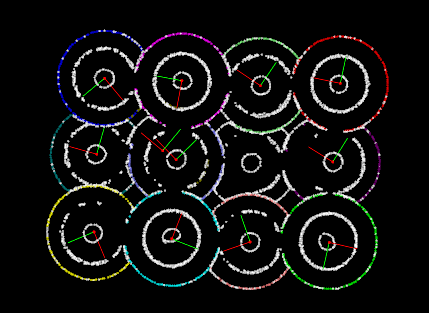
When the Expected Number of Detected Poses per Input Point Cloud is set to 6 and 12, the numbers of pose results output by this Step are shown in the left and right figures below, respectively.
There are 6 pose results in the left figure while there are 12 pose results in the right figure.