Getting Started with Deep Learning
After learning about the basics of deep learning, this section will guide you to dive deeper into deep learning. You need to select a deep learning model according to your actual requirement, and then you can apply the model in relevant tasks.
Select Deep Learning Solution
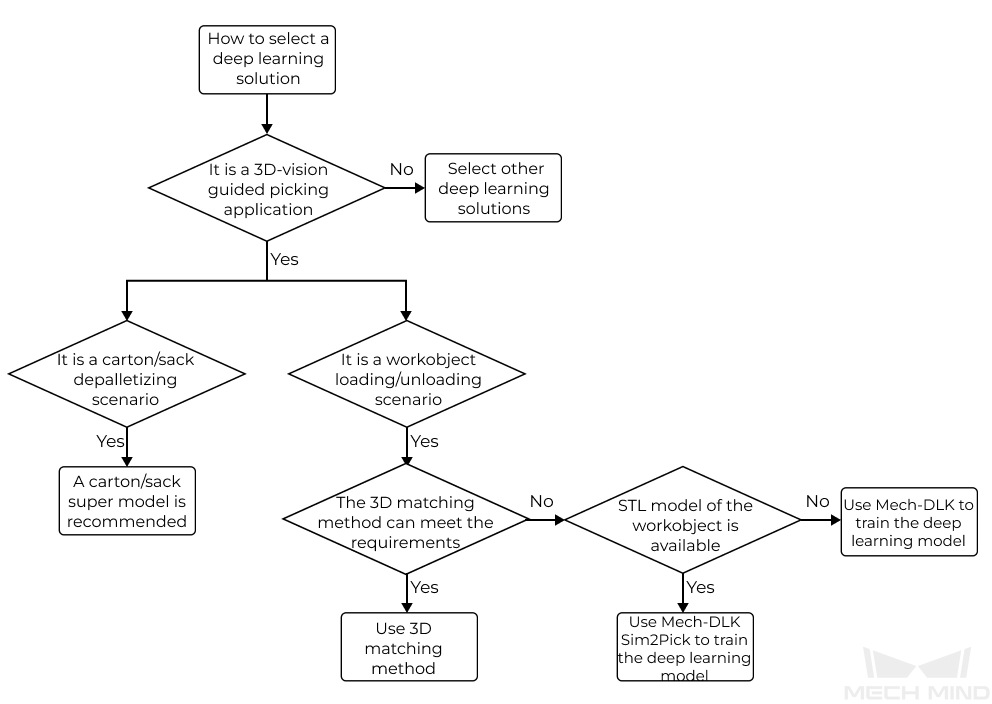
When designing the vision solution, you should determine the use scenario (Loading and unloading or palletizing and depalletizing) of the solution first. Also, you need to assess whether the recognition performance of traditional 3D matching methods can meet the requirements. Then you can decide whether to employ deep learning and the specific deep learning solution can be determined. If you cannot select a deep learning solution based on the actual situation, please contact Mech-Mind Technical Support for assistance.
If traditional methods fail to address the following issues during the vision recognition process, employing deep learning may provide a solution.
| No. | Challenges to traditional methods | Illustration |
|---|---|---|
1 |
The surfaces of the target objects are highly reflective, and the quality of the point cloud is poor. |
|
2 |
The geometric features on the target object’s point cloud are fewer, and the number of feature points in the point cloud is lower. |
|
3 |
When the target objects are neatly arranged and closely fitted, it is difficult to identify the point clouds of individual objects or the point clouds of individual objects may be misidentified. |
|
4 |
The target object feature is only visible in the 2D image but not visible in the point cloud. |
|
5 |
The project has a high requirement on the vision cycle time. When there is a large number of target objects, the matching time using the point cloud model can be long. By using deep learning to first filter a batch of target objects and then performing matching, the time required for matching can be shortened. |
|





Apply Deep Learning
After the deep learning solution is determined, please refer to How to Apply Deep Learning to learn about the workflow of applying deep learning to assist the 3D vision-guided robot picking.