Configure EtherNet/IP Communication
This section introduces how to configure the EtherNet/IP communication. Before configuration, please confirm that you have already selected the robot and entered the communication configuration interface.
-
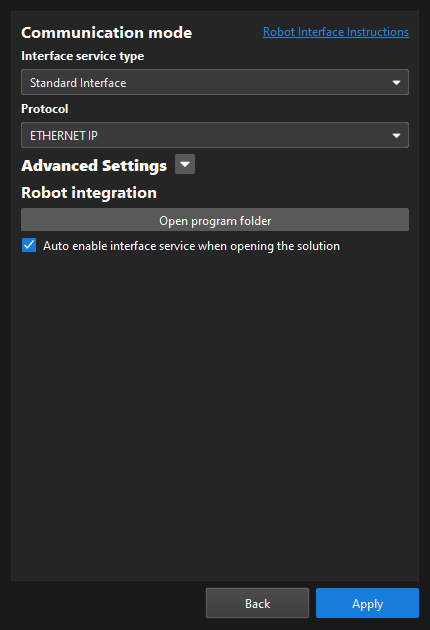
In the Communication mode section, set the “Interface service type” parameter to Standard Interface, and set the “Protocol” parameter to ETHERNET IP.
-
(Optional) In the Advanced Settings section, configure parameters as needed.
-
Max num of poses to send per time: When you use the run Mech-Vision project command, you can set the maximum number of poses that can be sent by the vision system each time. The maximum number is 30.
-
Timeout for getting Mech-Viz data (s): If you use the run Mech-Viz project command and Mech-Viz does not return the result during the specified timeout period, a timeout error code will be returned.
-
Timeout for getting Mech-Vision data (s): If you use the run Mech-Vision project command and Mech-Vision does not return the result during the specified timeout period, a timeout error code will be returned.
-
Return "1102:Successfully triggered" after the capture: In eye in hand scenarios, if you select this option, the vision system will return "1102:Successfully triggered" after the camera finishes image-capturing. This way, the robot can move immediately without waiting for the Mech-Vision project to finish running, shortening the cycle time. If you do not select this option, the robot have to wait for the Mech-Vision project to stop running before moving.
After you select this option, Timeout waiting for capture completion (s) will be displayed. If the camera needs a relatively long period of time to capture the image, specify a larger timeout period. -
Property Configuration: This button does not take effect on the selected protocol. Please ignore this button.
-
Reset: Reset the preceding configuration items (except Property Configuration) to default values.
-
-
(Optional) Select Auto enable interface service when opening the solution. When the solution is opened, you do not need to start the interface service manually.
-
Click the Apply button.
Next, you need to complete the remaining Standard Interface configuration according to the communication object.