Basics of Deep Learning
In some visual recognition processes, traditional matching and clustering methods may not achieve satisfactory results. For instance, when picking highly reflective target objects, the quality of point clouds may be poor, leading to inaccurate results from 3D matching methods. Additionally, when picking target objects that are closely placed against each other, the results from clustering methods may not be desirable, adversely affecting visual recognition and robot picking. Given these circumstances, you can consider using deep learning for assistance in recognition.
Deep learning falls within the realm of artificial intelligence and involves intricate neural network models.Once a large amount of data is input, deep learning techniques can simulate the human learning process, predict or identify patterns based on extensive datasets, extract data features, and subsequently perform relevant tasks.
Mech-Mind provides an instance segmentation algorithm module in the field of 3D vision-guided robot picking. When traditional methods fail to achieve the expected results, the instance segmentation method can be used to assist in recognition. The following sections will introduce the effects of the instance segmentation algorithm module in various picking scenarios.
Palletizing and Depalletizing
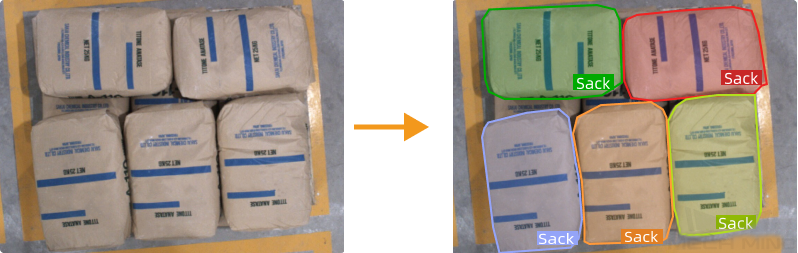
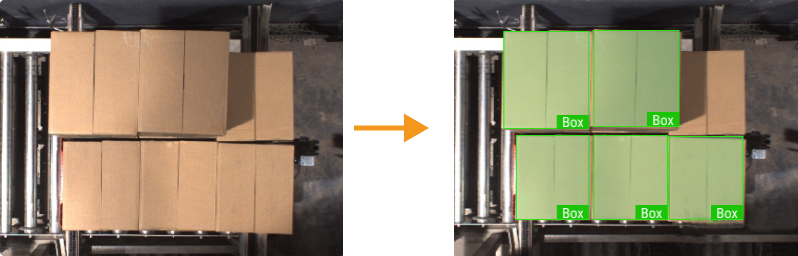
Palletizing and depalletizing refers to disassembling objects such as cartons, turnover boxes, and sacks from the pallet as required, and placing them on the pallet or related equipment (such as bag opening devices, conveyors, etc.). The instance segmentation algorithm module can segment cartons and sacks that are closely placed against each other, as shown in the figure below.
Loading and Unloading
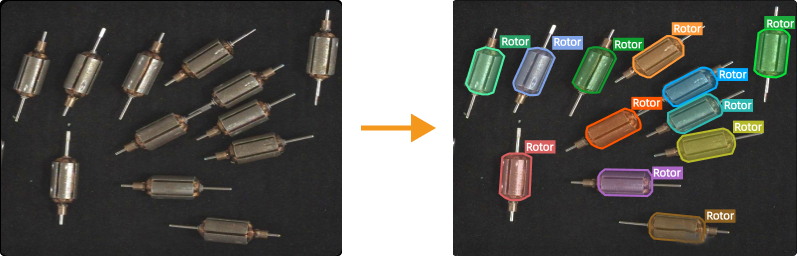
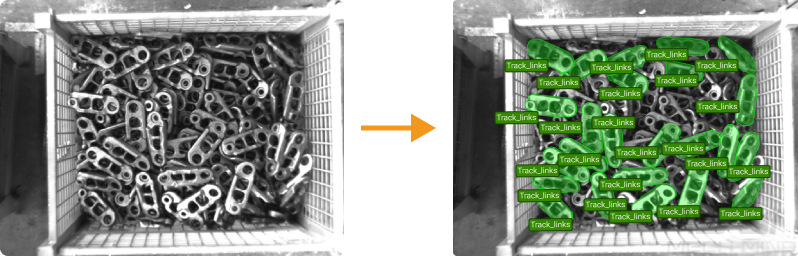
Loading and unloading refers to the handling and picking of complex target objects, metal components, and irregular parts in industries such as automotive, steel, and machinery. The instance segmentation algorithm module can segment the contour of each target object while simultaneously outputting class labels. For example, it can segment scattered and stacked rotors, track links, as shown in the figure below.