Point Cloud Clustering
Function
This Step can perform point cloud clustering according to specified rules, often used for segmentation of target objects.

Usage Scenario
This Step is usually used for point cloud preprocessing to eliminate interference from unwanted point clouds.
Input and Output
Parameter Description
| Parameter | Description |
|---|---|
Cluster Algorithm |
Description: This parameter is used to select the clustering method. List of values: EuclideanCluster, RegionGrowingSeg
Default value: EuclideanCluster Tuning recommendation: It is recommended to use the default value. |
The following sections introduce the parameters for the two clustering methods above.
EuclideanCluster
| Parameter | Description |
|---|---|
Max Distance Between Neighboring Points in Output Clusters |
Description: This parameter is used to set the maximum distance between points in the cluster. When this parameter is increased, points that are farther apart will be grouped into the same cluster. When it is decreased, points that are closer together will be grouped into different clusters. Default value: 3.000 mm Example: As shown in the figure below, the left image shows the clustering result when this parameter is set to 3.000 mm, and the right image shows the result when adjusted to 5.000 mm. After adjusting the parameter, the point clouds indicated by the orange arrows are all green, which means that they are classified in the same cluster. 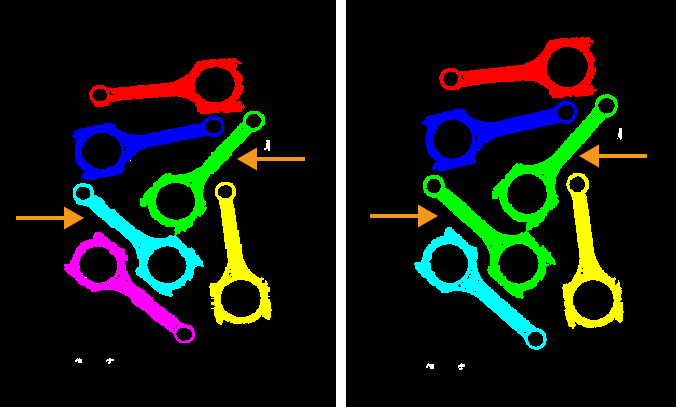
|
Min/Max Point Count per Cluster |
Description: This parameter is used to filter the clustering results. Only point clouds with a point count between the two parameter values will be output.
|
RegionGrowingSeg
| Parameter | Description |
|---|---|
Number of Neighbours |
Description: This parameter is used to set the number of neighboring points to be compared for each point. When this parameter is increased, more points will be used for comparison, which will lead to fewer clustering results.
|
Smoothness Threshold |
Description: When this parameter is increased, the tolerance for normal angle differences between neighboring points becomes larger, and points with larger normal angle differences will still be grouped together.
|
Min/Max Point Count per Cluster |
Description: This parameter is used to filter the clustering results. Only point clouds with a point count between the two parameter values will be output.
|