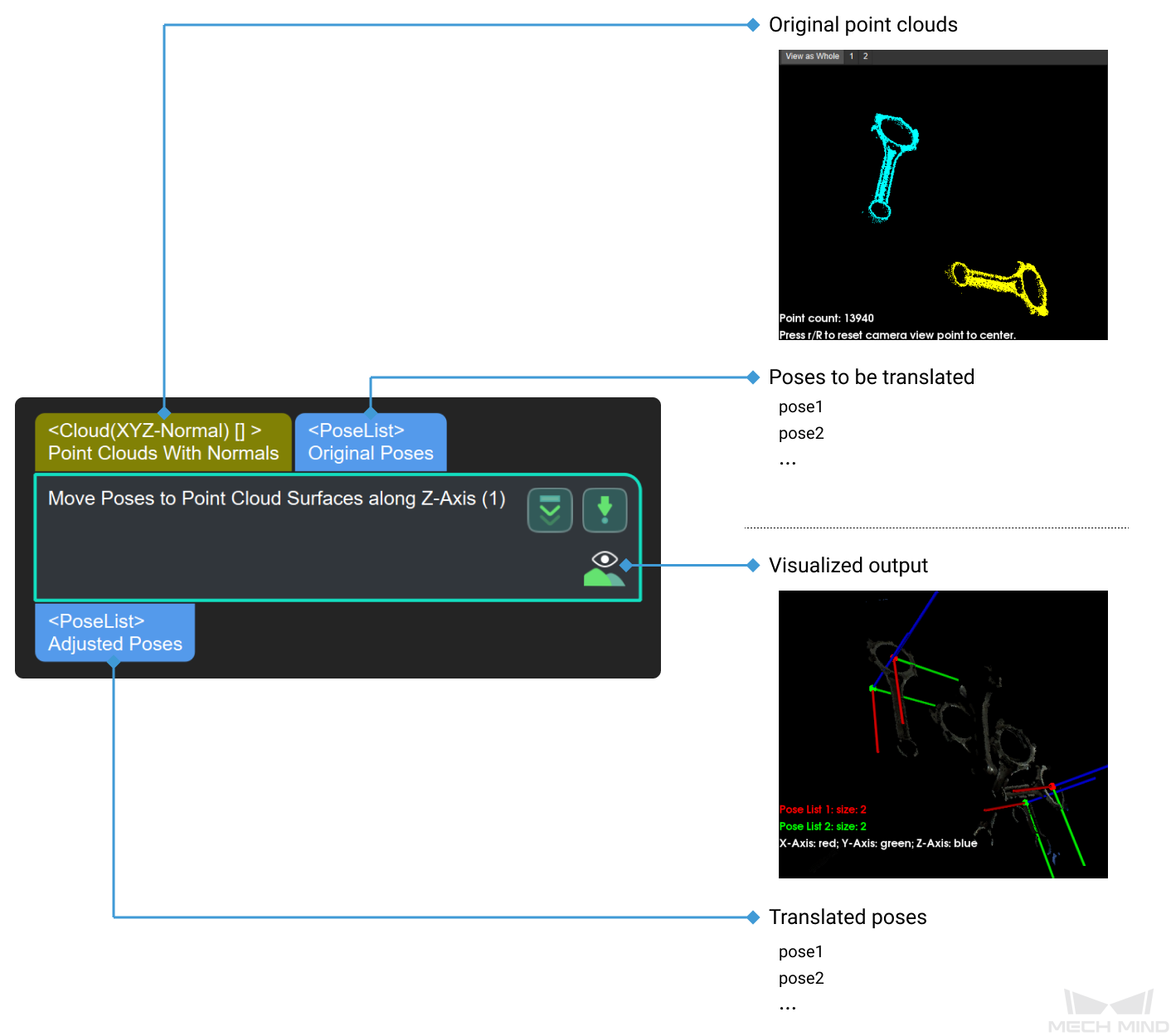
Move Poses to Point Cloud Surfaces along Z-Axis
|
Contents of this Step are under maintenance. If you need more information about this Step with urgency, please contact us at docs@mech-mind.net. |
Function
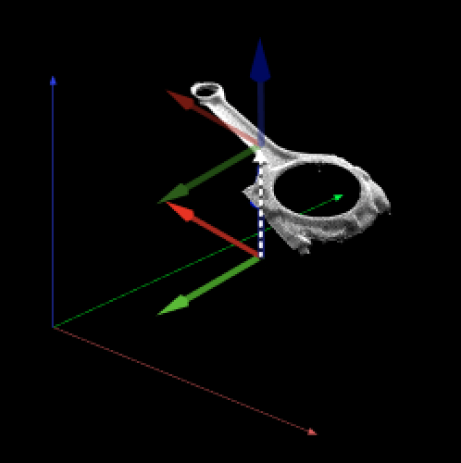
Move poses to point cloud surface along the Z-axis of a specified reference frame according to user-set rules.
Usage Scenario
This step is generally used to adjust the poses which are not on object surfaces. Causes of producing such poses include tilted target object and concave/convex surface. It is usually used after the Step Calc Poses and Dimensions from Planar Point Clouds.