Configure Collision Detection
The interface of the Configure Collision Detection panel is shown as below.
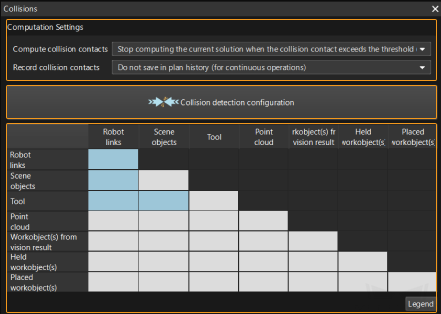
Computation Settings: The speed of project execution can be improved by setting this option. Please refer to Computation Settings for detailed information.
Collision Detection Configuration: Click Collision detection configuration in the Collisions tab to open the Collision Detection Configuration window. You can configure the detection of collisions between the following objects such as point clouds, robot tools, robot links, and other objects. Please refer to Collisions for detailed information.
Collision Detection Table: The collision detection table shows the configuration of all collision detections. Click legend to see the meaning of the different colors in the table.