Is Vision Result Used Up
Function
Check if the vision result in the corresponding Vision Move Step is used up.
| This Step only takes effect when the Reuse Vision Result parameter in Vision Move is selected. |
Usage Scenario
When the vision result in Vision Move contains multiple pickable poses, the software will guide the robot with the poses to pick until the pickable poses are used up.
When the poses in the vision result are used up, the camera will capture an image again. For scenarios that have a high requirement on the takt time, reusing vision result can reduce the vision processing time and shorten the takt time.
Parameter Description
General Parameters of Non-Move Steps
Skip Execution
| None |
Default setting. Do not skip the current Step. |
| Simulation only |
Skip the current Step during simulation. The exit port is specified by Out Port When Skip. |
| Always |
Skip the current Step when the project is simulating or running. The exit port is specified by Out Port When Skip. |
| Instruction |
When Simulation only or Always is selected, the current Step will be skipped and the subsequent Step will be executed when running the project. If this parameter is set to None in “Check DI” Step in the project, and there is no external input signal during simulation, the project will be stopped when executing to this Step. In this case, setting the parameter to Simulation only or Always enables the simulation to continue. |
Pre Plan Out Port
To make the path planning process in the actual application continuous, the software will execute a pre-planning beforehand on the backend. Specifying a pre-plan exit port along which the project is most likely to proceed can reduce the probability of re-planning and the wait time of the robot.
| -1 |
Do not specify an exit port for pre-planning. |
| 0 |
The project will take the Not used up exit port during pre-planning. |
| 1 |
The project will take the Used up exit port during pre-planning. |
Example
In a depalletizing task, the camera usually captures one image for one layer, and the corresponding vision result will be used to pick all the cartons on the same layer. Is Vision Result Used Up can be used to determine whether all the cartons on the same layer are picked.
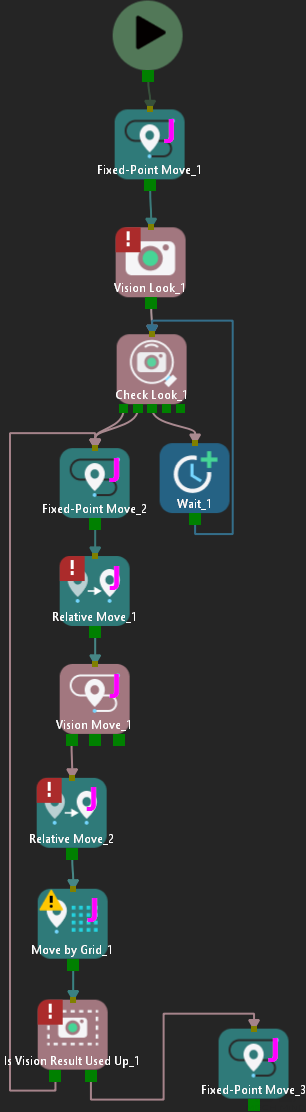
-
If the vision result is not used up, the robot will pick repeatedly.
-
If the vision result is used up, the Used up exit port will be taken.