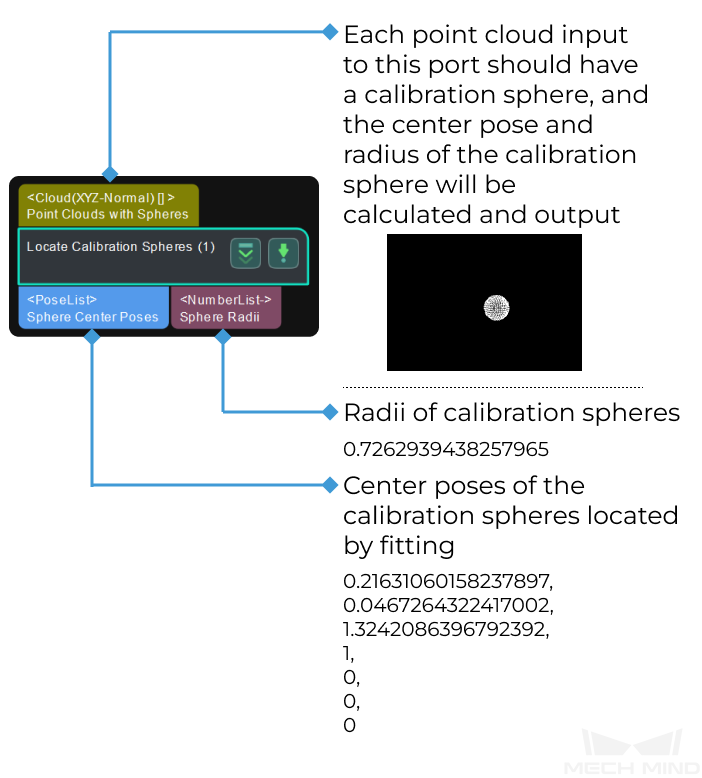
Locate Calibration Spheres
Function
This Step is used to fit a sphere (calibration sphere) in each input point cloud, and output the center pose and radius of each calibration sphere.
Usage Scenario
This Step is used to compensate for the temperature drifts of the camera and robot by locating the calibration spheres in the scene in measurement scenarios.