Configure TCP/IP Communication
This section introduces how to configure the TCP/IP communication. Before configuration, please confirm that you have already selected the robot and entered the Communication Option interface.
-
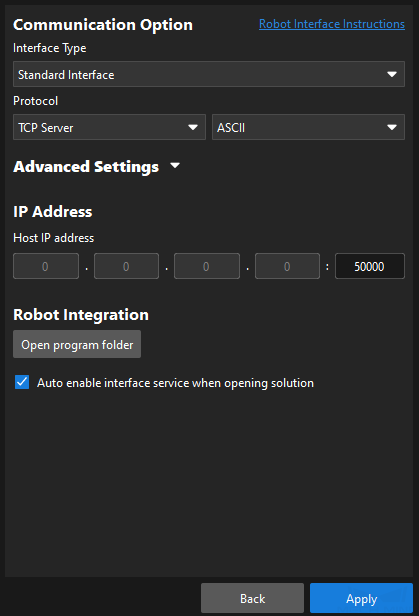
On the Communication Option interface, set the Set Interface Type parameter to Standard Interface, set the Protocol parameter to TCP Server, and set the data transmission format according to the following table.
Robot Brand Data Transmission Format ABB
HEX-Little endian
FANUC
HEX-Big endian
KUKA
HEX-Little endian
Yaskawa
ASCII
Kawasaki
ASCII
UR
ASCII
TM
ASCII
ELITE
ASCII
JAKA
ASCII
ROKAE
ASCII
NACHI
ASCII
Others
You need to write the robot-side communication program. You can determine the data transmission format according to the support for HEX and ASCII.
-
For the Host IP address parameter, enter the port number.
The port number should be set to 50000 or larger.
-
(Optional) Select Auto enable interface service when opening solution. When the solution is opened, you do not need to start the interface service manually.
-
Click the Apply button.
Next, you need to complete the following operations according to the selected robot.
-
If a listed robot is selected, complete the subsequent operations by referring to the corresponding documents in the following table.
| Robot Brand | Reference Document |
|---|---|
ABB |
ABB Standard Interface Configuration |
FANUC |
FANUC Standard Interface Configuration |
FANUC CRX |
CRX Plugin Installation and Configuration |
Kawasaki |
Kawasaki Standard Interface Configuration |
KUKA |
KUKA Standard Interface Configuration |
YASKAWA |
YASKAWA Standard Interface Configuration |
UR |
URCap Plugin Installation and Configuration |
TM |
TM Standard Interface Configuration |
LITE |
ELITE Standard Interface Configuration |
JAKA |
JAKA Standard Interface Configuration |
-
If a listed robot other than the preceding robot brands is selected, you need to write the robot-side communication program by referring to Standard Interface Development Manual. For calibration, you can perform automatic calibration by referring to Master-control Communication.
-
If a custom robot is selected, you need to write the robot-side communication program by referring to Standard Interface Development Manual. For calibration, you can perform manual calibration.