Configure TCP/IP Communication
This guide introduces how to configure the TCP/IP communication. Before configuration, please confirm that you have already selected the robot and entered the communication configuration interface.
-
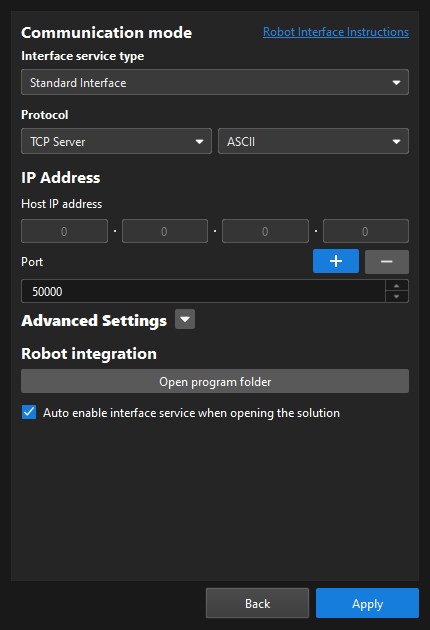
In the Communication mode section, set the “Interface service type” parameter to Standard Interface, set the “Protocol” parameter to TCP Server, and set the data transmission format according to the following table.
Robot Brand Data Transmission Format ABB
HEX (Little-endian)
FANUC
HEX (Big-endian)
KUKA
HEX (Little-endian)
Yaskawa
ASCII
Kawasaki
ASCII
UR
ASCII
TM
ASCII
ELITE
ASCII
JAKA
ASCII
ROKAE
ASCII
Others
You need to write the robot-side communication program. You can determine the data transmission format according to the support for HEX and ASCII.
-
In the IP Address section, enter the port number of the host.
The port number should be set to 50000 or larger.
-
(Optional) In the Advanced Settings section, configure parameters as needed.
-
Max num of poses to send per time: When you use the run Mech-Vision project command, you can set the maximum number of poses that can be sent by the vision system each time. The maximum number is 30.
-
Timeout for getting Mech-Viz data (s): If you use the run Mech-Viz project command and Mech-Viz does not return the result during the specified timeout period, a timeout error code will be returned.
-
Timeout for getting Mech-Vision data (s): If you use the run Mech-Vision project command and Mech-Vision does not return the result during the specified timeout period, a timeout error code will be returned.
-
Return "1102:Successfully triggered" after the capture: In eye in hand scenarios, if you select this option, the vision system will return "1102:Successfully triggered" after the camera finishes image-capturing. This way, the robot can move immediately without waiting for the Mech-Vision project to finish running, shortening the cycle time. If you do not select this option, the robot have to wait for the Mech-Vision project to stop running before moving.
After you select this option, Timeout waiting for capture completion (s) will be displayed. If the camera needs a relatively long period of time to capture the image, specify a larger timeout period. -
Reset: Reset the preceding configuration items (except Property Configuration) to default values.
-
-
(Optional) Select Auto enable interface service when opening the solution. When the solution is opened, you do not need to start the interface service manually.
-
Click the Apply button.
Next, you need to complete the remaining Standard Interface configuration according to the selected robot.