Project 3D Point Cloud to 2D Image
Usage Scenario
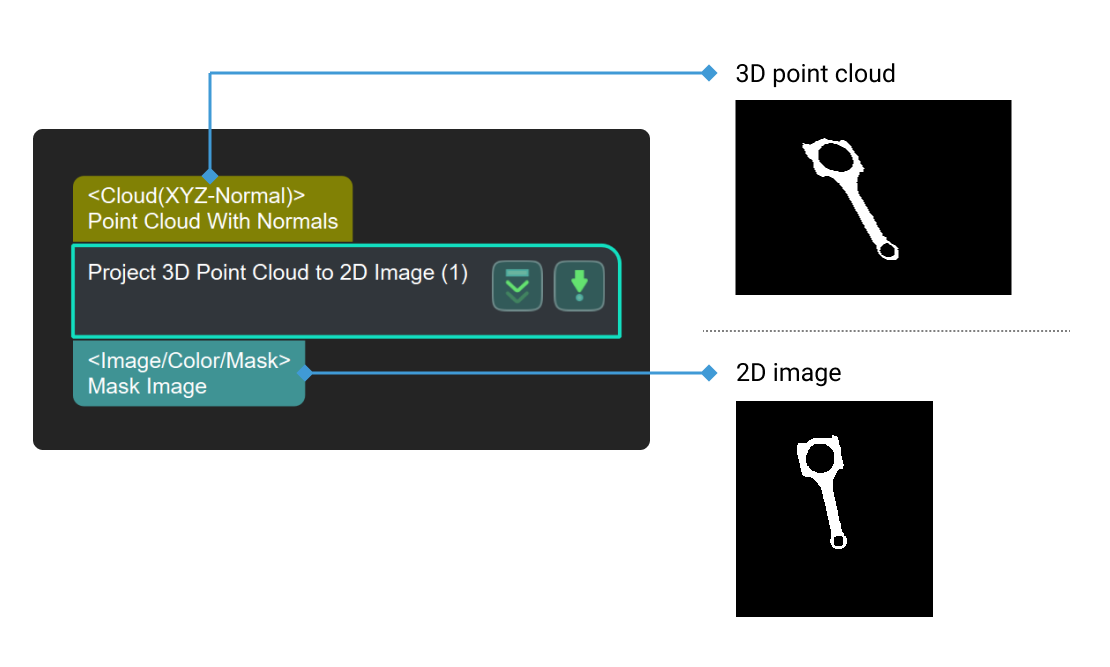
This Step is used for point cloud preprocessing. First, the point cloud will be projected onto a 2D image. Then, 2D image processing methods (such as 2D morphological operations) will be used to process the image, and the 2D image can be converted back to the point cloud by the Apply Masks to Point Cloud Step.
For picking scenarios, it is recommended to set the Projection Type to PerspectiveProjection.
For measurement scenarios, set the Projection Type to OrthographicProjection. However, using the Orthographic Projection Step to replace this Step is more recommended in this case.
Parameter Description
- Projection Type
-
Parameter description: This parameter specifies the projection type to convert the point cloud to the 2D image.
Value list:
-
PerspectiveProjection: perspective projection suitable for picking scenarios.
-
OrthographicProjection: orthographic projection suitable for measurement scenarios.
Default value: PerspectiveProjection
-
PerspectiveProjection
- Image Type
-
Parameter description: This parameter specifies the type of the output 2D image.
Value list:
-
Color: colored image
-
Depth: depth map
Default value: Color
-
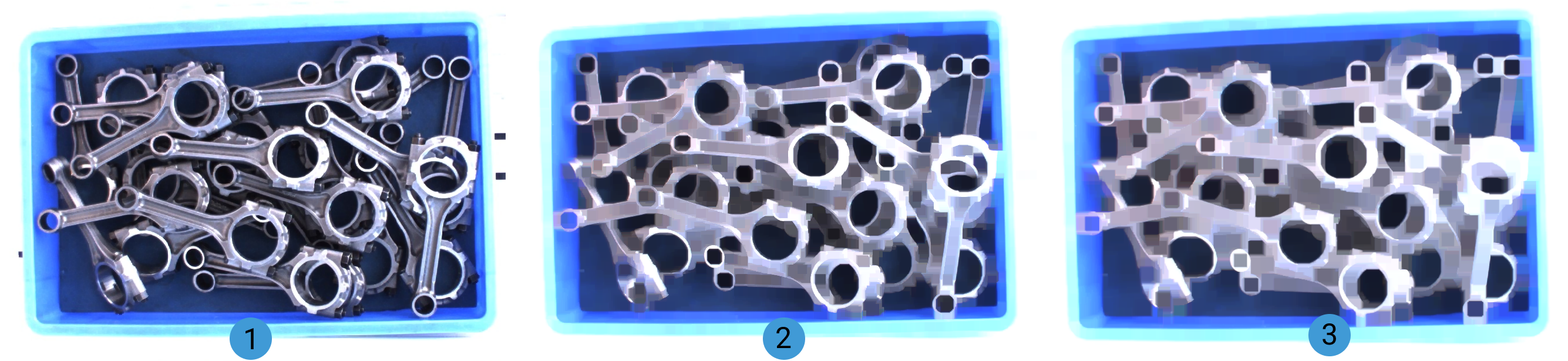
- Dilate Kernel Size
-
Parameter description: This parameter is used to set the size of dilate kernel (px). Dilate kernel is used to increase the area of the object, and connect the damaged parts. The larger the value, the more region dilates; the smaller the value, the less region dilates.
Default value: 21 px
Example: From Figure 1 to 3, the set kernel size is gradually increased.

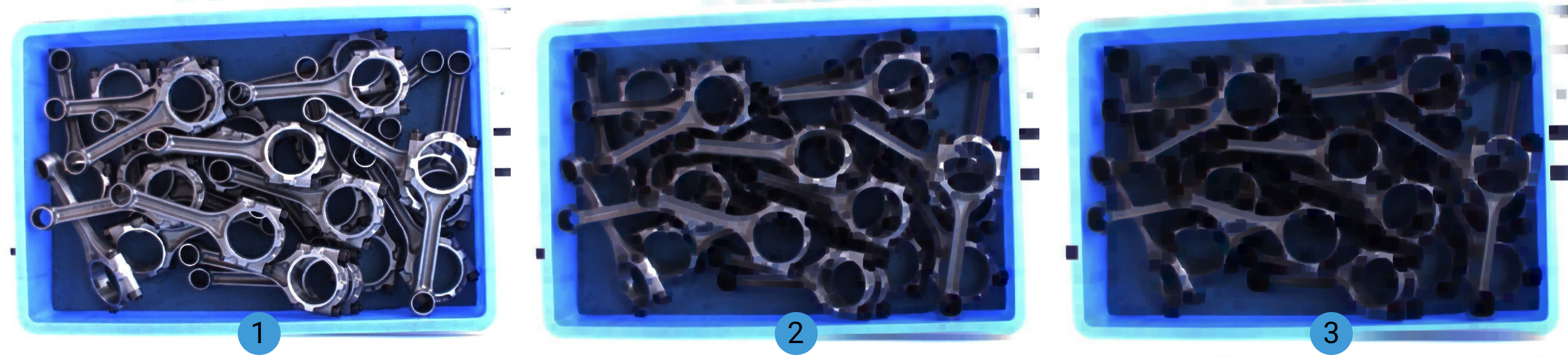
- Erode Kernel Size
-
Parameter description: This parameter is used to set the size of erode kernel (px). Erode kernel is used to remove the small image noises, and separate connected objects. The larger the value, the more region erodes; the smaller the value, the less region erodes.
Default value: 21 px
Example: From Figure 1 to 3, the set kernel size is gradually increased.
OrthographicProjection
Projection Operation
- Project Along Object Z Axis
-
Parameter description: Once this option is enabled, the point cloud will be projected along its Z-axis.
Default setting: selected.
- Scale Ratio
-
Parameter description: This parameter specifies the scale ratio of the image after the projection.
Default value: 1000
- Closing Operation Kernel Size
-
Parameter description: This parameter is used to set the closing operation kernel size (px). It can fill small cavities in the object, connect neighboring objects, and smooth their boundaries without significantly altering their area. The larger the value, the more obvious the effect.
Default value: 7 px
Example: From Figure 1 to 3, the set kernel size is gradually increased.