Classify Point Clouds by Dimensions
Function
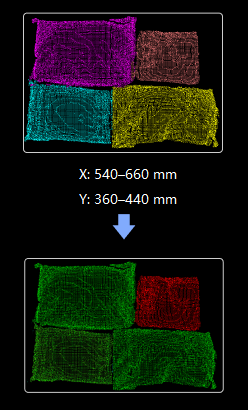
This Step judges whether the input point cloud is eligible based on the reference dimensions. If the deviation between the dimensions of an input point cloud and the reference dimensions is within the threshold range, the point cloud is eligible; otherwise, it is not eligible.
Usage Scenario
This Step is usually used in sack depalletizing scenarios. This Step can determine whether the sack point clouds from previous Steps are eligible, acting as an error-proofing mechanism to filter out inaccurate recognitions from deep learning.
This Step is usually used with such Steps as Apply Masks to Point Cloud and Get Highest Layer Clouds.
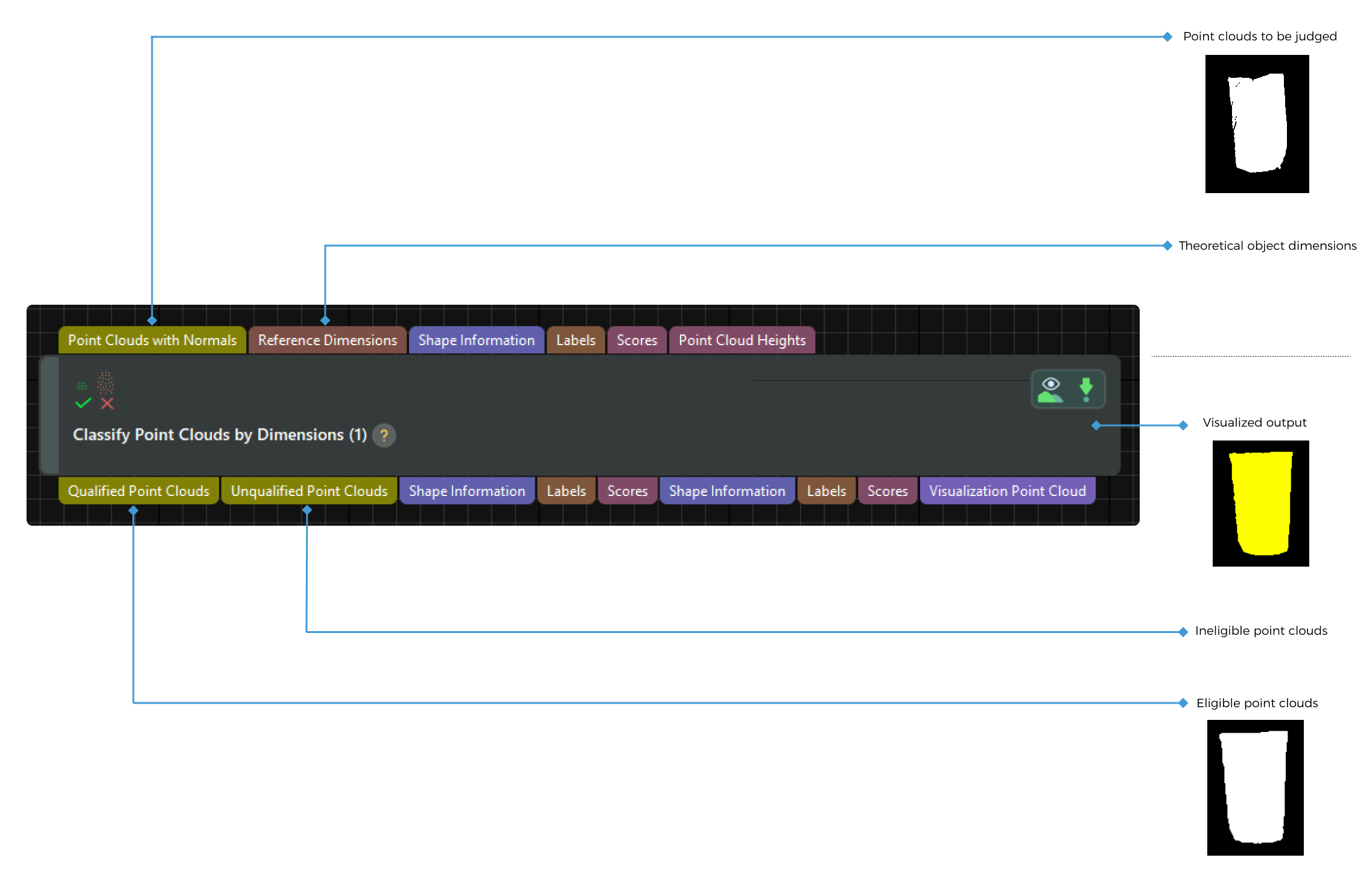
Input and Output
Length Difference Threshold Settings
|
Length Difference = Point Cloud Length - Reference Length |
- Lower/Upper Ratio Threshold
-
Description: This parameter specifies the maximum/minimum ratio threshold between the length difference and the reference length. If the ratio of the length difference to the reference length exceeds this threshold range, the point cloud is eligible; otherwise, the point cloud is not eligible.
Default value: -0.2500/0.25500
Value range: -1–0/0–1
Suggestion: Set the parameter according to your actual requirements.
|
If (1+ Lower Ratio Threshold)* Reference Length < Point Cloud Length < (1+ Upper Ratio Threshold)* Reference Length, the point cloud is eligible. Otherwise, the point cloud is not eligible. For example, if the input reference dimensions are [1,0.5,0.1] and the Lower and Upper Ratio Thresholds are set to the default values, the acceptable range for the point cloud length is [1+(-0.25)]*1 - (1+0.25)*1, which means that the point cloud length within the range of 0.75 m to 1.25 m is eligible. |
Width Difference Threshold Settings
|
Width Difference = Point Cloud Width - Reference Width |
- Lower/Upper Ratio Threshold
-
Description: This parameter specifies the maximum/minimum ratio threshold between the width difference and the reference width. If the ratio of the width difference to the reference width exceeds this threshold range, the point cloud is eligible; otherwise, the point cloud is not eligible.
Default value: -0.2500/0.25500
Value range: -1–0/0–1
Suggestion: Set the parameter according to your actual requirements.
|
If (1+ Lower Ratio Threshold)* Reference Width < Point Cloud Width < (1+ Upper Ratio Threshold)* Reference Width, the point cloud is eligible. Otherwise, the point cloud is not eligible. For example, the input reference dimensions of this Step are [1,0.5,0.1], and the Lower and Upper Ratio Thresholds are set to the default values. Then the acceptable range for point cloud width is [1+(-0.25)]*0.5 - (1+0.25)*0.5, which means that the point cloud width within the range of 0.375 m to 0.625 m is acceptable. |
Height Difference Threshold Settings
|
Height Difference = Point Cloud Height - Reference Height |
- Lower/Upper Ratio Threshold
-
Description: This parameter specifies the maximum/minimum ratio threshold between the height difference and the reference height. If the ratio of the height difference to the reference height exceeds the threshold range, the point cloud is eligible; otherwise, the point cloud is not eligible.
Default value: -100.0000/100.0000
Suggestion: Set the parameter according to your actual requirements.
- Reference Height
-
Description: This parameter is used to set the reference height (in mm). This parameter only takes effect when the “Point Cloud Heights” port is not connected. If the input point cloud height is empty, the point cloud height = Z value of the point cloud pose - reference height.
Default value: 1000.000
Suggestion: Set the parameter according to your actual requirements.
|
Since this Step is used to filter out point clouds within a certain height range, the reference height set here and the height value input to the “Reference Dimensions” port represent the Z values of point cloud poses, instead of the point cloud height (thickness) calculated by the “Calc Poses and Dimensions from Planar Point Clouds” Step. |
|
If (1+ Lower Ratio Threshold)* Reference Height < Point Cloud Height < (1+ Upper Ratio Threshold)* Reference Height, the point cloud is eligible. Otherwise, the point cloud is not eligible. For example, if the input reference dimensions are [1,0.5,0.1], the Lower/Upper Ratio Threshold is the default value, and the Reference Height is 0.1, then the acceptable range of the Z values of the point cloud poses is [1+(-100)]*0.1 - (1+100)*0.1, which means that the Z values of the point cloud poses within the range of -9.9 m to 10.1 m are eligible. |
Aspect Ratio Settings
|
Aspect Ratio = Point Cloud Length/Point Cloud Width |
- Aspect Ratio Threshold
-
Description: This parameter is used to set the acceptable range for the aspect ratio of the point cloud.
Default value: 1000000.0000
Suggestion: Set the parameter according to your actual requirements.
|
If (1-Aspect Ratio Threshold)* Reference Aspect Ratio < (1+ Aspect Ratio Threshold)* Reference Aspect Ratio, the point cloud is eligible. Otherwise, the point cloud is not eligible. For example, if the input reference dimensions are [1,0.5,0.1] and the aspect ratio threshold is 10, then the input aspect ratio of the point cloud is 1 / 0.5 = 2, and the acceptable range for the aspect ratio of the point cloud is (1-10) * 2–(1+10) * 2, which means that the aspect ratio of the point cloud within the range of -18 to 22 is eligible. |