Smart Path in Bin
Project Introduction
The example demonstrates how to use the Smart Path in Bin Step to pick randomly stacked cylindrical tubes from a deep bin. Based on information of the bin and target object models, Mech-Viz automatically generates a path for the robot to enter the bin, pick the target object, and exit the bin, effectively avoiding collisions.
The operation effect is as follows:
Application Scenario
It is applicable for picking target objects that are neatly arranged or randomly stacked in a deep or shallow bin.
| Target objects in shallow bin | Target objects in deep bin |
|---|---|
|
|


Workflow Description
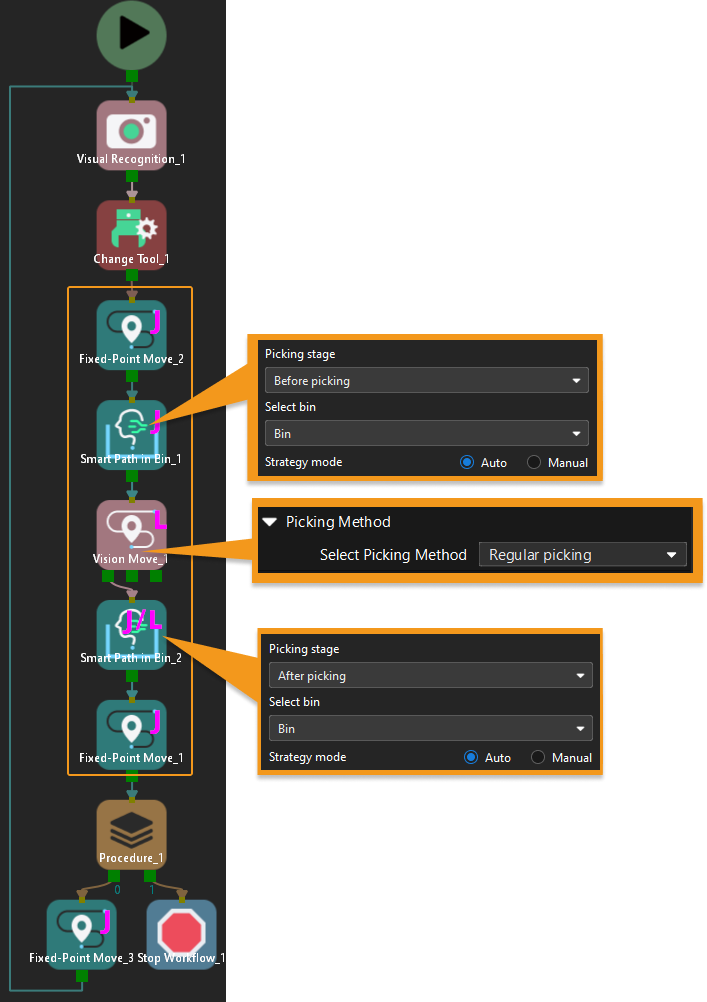
The project paradigm with the Smart Path in Bin Step is shown in the figure below.
The following points should be noted when building the project:
-
The Smart Path in Bin Step should be added for both the paths of entering and exiting the bin, and the Smart Path Planning in Bin Step should be adjacent to the Vision Move Step.
-
The Picking Method set in the Vision Move Step must be Regular picking.
-
The Smart Path in Bin Step cannot be placed at the end of the workflow. It must be followed by a move-type Step with a fixed waypoint.
-
Each Smart Path in Bin Step corresponds to two waypoints. When the Picking Stage is set to Before picking, the corresponding waypoints are Approach point and Enter-bin point. When thePicking Stage is set to After picking, the corresponding waypoints are Retreat point and Exit-bin point. When writing the robot communication program, it is important to receive the two waypoints. Please refer to Example Program for detailed description.
-
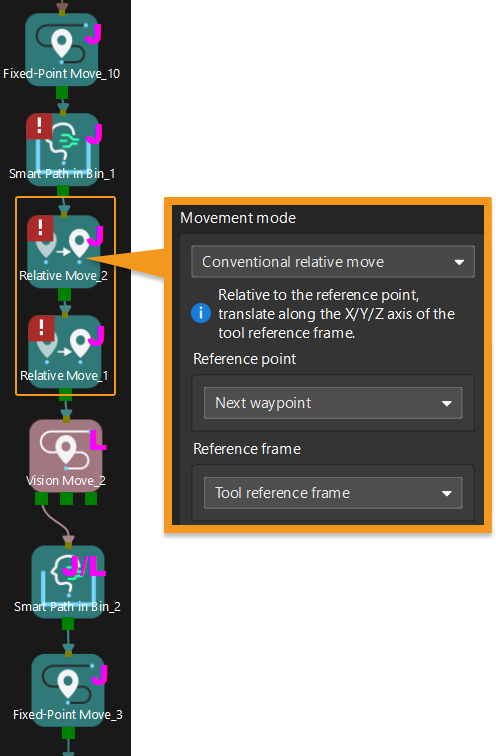
When the Picking Stage of the Smart Path in Bin Step is set to Before picking, one or more Relative Move Steps can be added between the Smart Path in Bin and the Vision Move Step. Moreover, all Reference points of the Relative Move Steps should be set to Next waypoint.
Parameter Description
-
The Smart Path in Bin Step
Picking stage: For the Smart Path in Bin Step before the Vision Move Step, its Picking Stage should be set to Before picking, while for the Smart Path in Bin after the Vision Move Step, its Picking Stage should be set to After picking.
Select bin: Select the bin added in Scene objects in the project resource tree. If the pose or dimensions of the bin are set incorrectly, or if the wrong bin is selected, it may lead to path planning failures or even collisions during the picking process.
Strategy mode: Refer to Strategy Mode for a detailed introduction.
-
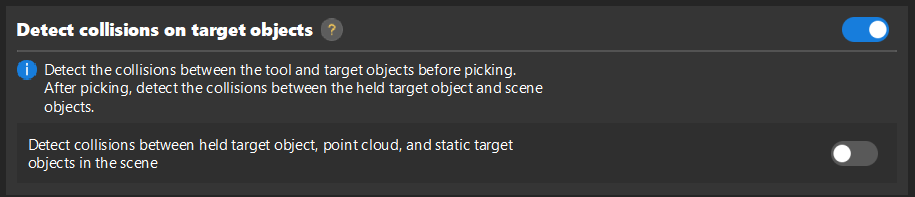
Collision detection parameter configuration
When using the Smart Path in Bin Step, you should enable Detect collisions on target objects in the Collisions functional panel. For more instructions on adjusting parameters for collision detection, refer to Collision Detection Parameter Configuration.
Notes
To apply this example in actual production, you can modify and configure the project according to the following notes to quickly put it into use.
-
Close vision records, and call the corresponding Mech-Vision project to obtain vision results by the Visual Recognition Step.
-
Configure models for scene objects and tools.
-
Configure parameters in the Collisions functional panel.