Error in Step “Capture Images from Camera”: The current calibration method is EIH, and the robot pose cannot be obtained
Symptom:
After Mech-Vision is upgraded from 1.6.2 to 1.7.0, when using the Standard Interface to call the project, the “Capture Images from Camera” Step prompted an error: the current calibration method is EIH, and the robot pose cannot be obtained.
Affected Versions:
1.7.x version.
Possible Cause:
The names of some robot models are inconsistent after the software upgrade.
Solution:
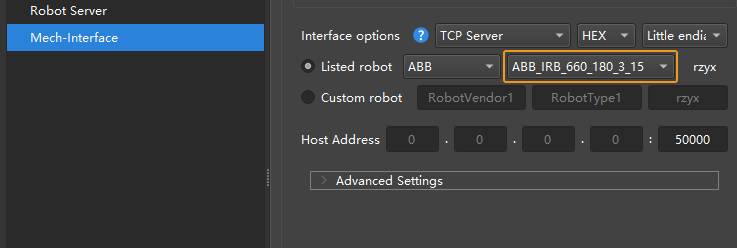
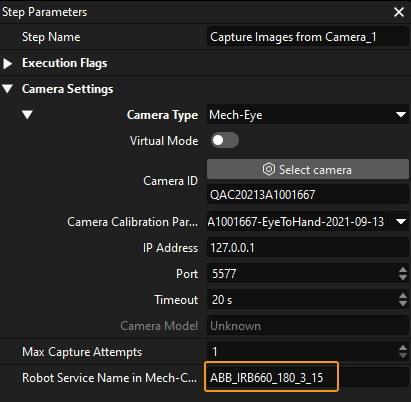
Make sure the robot name in the Deployment Settings of Mech-Center and the “Robot Service Name in Mech-Center” in the Step parameters of the “Capture Images from Camera” Step in the Mech-Vision project are consistent.