3D Matching and Classification (Multiple Models)
Function
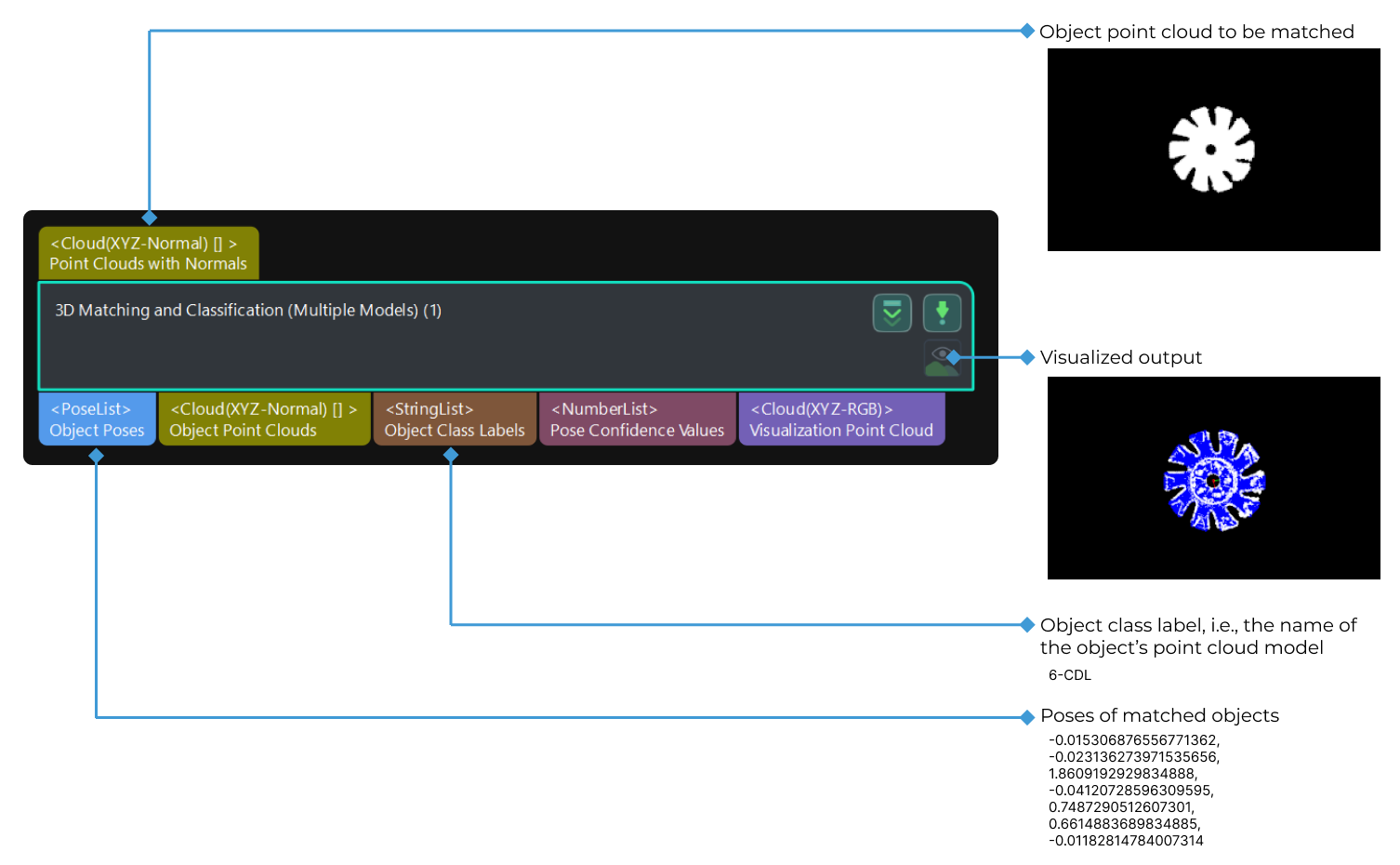
This Step can match the objects in the scene by using multiple point cloud models and output the poses and class labels of the objects.
Usage Scenario
This Step is usually used for the matching and classification of a single object in the scene. If there are multiple objects in the scene, point cloud clustering or deep learning can be utilized to segment objects first and then each object can be matched and classified by using this Step.
Input and Output
After inputting the point clouds of objects, this Step will output the object poses with the same amounts as point clouds.
The input and output of this Step are shown below with the example of inputting a point cloud of a single object.
Parameter Description
Parameter Tuning Level
Parameter description: This parameter is used to select the tuning level of the parameters. The parameters in different tuning levels are different.
Value list: Basic, Advanced
Default value: Basic
Tuning recommendation: Select the parameter tuning level according to your need.
Basic Parameter Tuning Level
Model Settings
- Select Model
-
Description: This parameter is used to select the point cloud model.
Instruction: Select an available point cloud model in the drop-down list. Please refer to Point Cloud Model and Pick Point Creation for more information about making a point cloud model.
-
The point cloud model type should be the same. You cannot select Surface point cloud model and Edge point cloud model at the same time.
-
The sizes of the point cloud models should not differ too much. It is recommended that the difference between the largest point cloud model and the smallest one should not exceed 1.5 times. Otherwise, the matching speed will be affected. If there is a large disparity in the sizes of the point cloud models, it is recommended to classify the input scene point cloud first by using the Classify Point Clouds by Dimensions Step.
-
- Matching Mode
-
Description: This parameter is used to select the mode according to the type of the point cloud model. If the point cloud model represents the edge of the object, select “Edge matching.” If the point cloud model represents the surface of the object, select “Surface matching.”
Value list: Surface matching, Edge matching.
-
Surface matching: Use the object’s surface model for point cloud model matching.
-
Edge matching: Use the object’s edge model for point cloud model matching.
Tuning recommendation: When the surface of the object has obvious recognizable features (such as crankshafts, rotors, and steel rods), it is recommended to use surface matching. You should create a point cloud model that represents the surface features of the object. When the object is relatively flat and shows clear and regular edge features under the camera (such as panels, track pads, connecting rods, and brake discs), it is recommended to use edge matching. You should create a point cloud model that represents the edge features of the object.
If you select Edge matching, you should input the point clouds which are extracted the edges.
-
Coarse Matching Settings
- Operation Mode
-
Description: This parameter is used to select the operation mode for coarse matching.
Value list: High speed, Standard, High accuracy, Extra-high accuracy, and Custom.
Instruction: Under all kinds of operation modes, the matching accuracy and speed are different due to different number of points in the point cloud models. The following table provides a detailed description.
Operation Mode Number of Points in the Point Cloud Models Matching Characteristics High speed
200
High speed, low accuracy
Standard
300
Relatively stable
High accuracy
400
High accuracy, low speed
Extra-high accuracy
500
Highest accuracy
Custom
Custom
Determined by customized number of points
- Expected Point Count of Model
-
Description: This parameter is used to set the expected number of points in the point cloud model.
Default value: 200
Instruction: Set this parameter when Operation Mode is Custom.
Tuning recommendation: Please set the parameter according to the actual requirement.
When the matching or classification results are not satisfactory, it is recommended to prioritize the adjustment of this parameter to increase the “Expected Point Count of Model.”
Fine Matching Settings
- Operation Mode
-
Description: This parameter is used to select the operation mode for fine matching.
Value list: High speed, Standard, High accuracy, and Extra-High accuracy.
Instruction: Please refer to the operation modes of the “Coarse Matching Settings.”
Validation Settings
- Confidence Threshold
-
Description: If the confidence of the matching result is above the threshold, the matching result is valid. The higher the confidence value is, the more accurate the matching result is.
Default value: 0.300
Advanced Parameter Tuning Level
Model Settings
You can refer to the Basic Parameter Tuning Level.
Coarse Matching Settings
You can refer to the Basic Parameter Tuning Level.
- Expected Point Count of Model
-
You can refer to the Basic Parameter Tuning Level.
- Upper Limit of Point Pair Count per Feature
-
Description: This parameter is used to specify the maximum number of point pairs contained in each feature during the model analysis. The smaller this value is, the faster the processing speed, but the lower the accuracy of the matching results.
Default value: 50
Voting Settings
- Distance Quantification
-
Description: The parameter for the quantification of the distance between points (Distance between Two Points=Distance Quantification*Sampling Interval). The larger the value is, the less accurate the matching results.
Default value: 1.00
- Angle Quantification
-
Description: The parameter for the quantification of the angle between the normals of the points in the point pair (Angle between Two Vectors = 360°/Angle Quantification). The larger this value is, the more accurate the matching results, but it also requires higher point cloud quality.
Default value: 60
- Vote Ratio Lower Threshold
-
Description: In the matching process, each object pose will earn a score. When the pose score is higher than the “product of Highest Score in the Vote and Vote Ratio Lower Threshold,” the corresponding pose will be involved in the pose verification. The lower this value is, the more likely an exact match will be found, but the execution time will also be longer.
Default value: 0.80
- Referring Point Sampling Step
-
Description: This parameter is used to adjust the step size to downsample the scene point cloud and obtain referring points that form point pairs with the referred points. When the value is larger, the interval sampling points are fewer, and the execution speed is faster, but the matching accuracy is reduced.
Default value: 5
- Referred Point Sampling Step
-
Description: This parameter is used to adjust the step size to downsample the scene point cloud and obtain referred points that form point pairs with the referring points. When the value is larger, the interval sampling points are fewer, and the execution speed is faster, but the matching accuracy is reduced.
Default value: 1
Pose Verification Settings
- Use Distance NMS
-
Description: After this parameter is selected, candidate poses whose distances to the selected poses are less than 0.1 times the diameter of the object will be filtered out.
Default value: selected.
- Voxel Length Generation Strategy
-
Description: This parameter is used to select the method to generate the voxel length.
Default value: Auto.
Tuning recommendation: “Auto” is recommended to be used for new users.
- Voxel Length
-
Description: This parameter is used to set the length (mm) of the voxel. The larger the value, the less accurate the matching results.
Default value: 3.000 mm
- Voxel Length Lower Limit
-
Description: This parameter is used to set the minimum voxel length (mm).
Default value: 1.000 mm
- Voxel Length Upper Limit
-
Description: This parameter is used to set the maximum voxel length (mm).
Default value: 15.000 mm
Pose Filtering Settings (only available in the edge matching mode)
- Filter Poses by Model Rotation Angle
-
Description: In the edge matching mode, the point cloud model may need to be rotated by a certain angle to match with the scene point cloud, and the poses will be filtered by the point cloud model’s rotation angle. When the model’s rotation angle exceeds the “Angle Difference Upper Threshold,” the pose will be filtered out.
Default value: selected.
- Angle Difference Upper Threshold
-
Description: Please refer to the parameter “Filter Poses by Model Rotation Angle” for details.
Fine Matching Settings
- Deviation Correction Capacity
-
Description: This parameter is used to set the intensity of the deviation correction to the matching result from 3D Coarse Matching. The greater the deviation correction capacity is, the more likely the coarsely matched poses can be corrected to the accurately matched poses. Please note that an excessive deviation correction capability may lead to a loss of matching accuracy.
Value list: Small, Medium, and Large.
Default value: Small.
- Operation Mode
-
Description: You can refer to the Basic Parameter Tuning Level.
Symmetry settings
- Symmetry Axis
-
Description: This parameter is used to select the axis of rotational symmetry to rotate the initial pose of the object.
Value list: ROTATE_BY_X, ROTATE_BY_Y, and ROTATE_BY_Z
Default value: ROTATE_BY_Z
- Symmetry Angle Step (0–360)
-
Description: This parameter is used to set the step to change the initial orientation from “Min Rotation Angle” to “Max Rotation Angle.” The unit is degree (°).
Default value: 360.0°
Tuning instructions: The value of “Symmetry Angle Step” parameter should be greater than 0.
- Min Rotation Angle
-
Description: This parameter specifies the minimum rotation angle for the pose rotation according to the “Symmetry Angle Step.” The unit is degree (°).
Default value: -180.0°
- Max Rotation Angle
-
Description: This parameter specifies the maximum rotation angle for the pose rotation according to the “Symmetry Angle Step.” The unit is degree (°).
Default value: 180.0°
Validation Settings (The parameters need to be adjusted in the surface matching mode)
- Only Consider Visible Surface of Model
-
Description: Once this parameter is selected, only the visible part of the surface point cloud model will be involved in the matching, which facilitates the calculation and produces a more reasonable matching confidence.
Default value: Unselected.
Tuning recommendation: It is recommended to select this parameter for object models that have parts not visible to the camera under a viewing angle, such as the complete model of a cylindrical object. For object models that are completely visible from the same viewing angle, such as the surface matching model of the upper side of a brake disc, this parameter can be ignored.
Result Visualization
- Visualization Options
-
Description: After “Debug Output” is enabled, the selected option will be generated and displayed.
Value list: Coarse matching result, Fine matching result, Downsampled model for coarse matching, Downsampled model for fine matching, Downsampled scene point cloud for coarse matching, Downsampled scene point cloud for fine matching.
Default value: Fine matching result.
- Only Visualize Current Matching Result
-
Description: Once this parameter is selected, only the matching result corresponding to the current model will be visualized.
Default value: Unselected.
Instruction: Select the model for visualization if this parameter is unselected.
- Select Model for Visualization
-
Description: This parameter is used to select the point cloud model that you want to visualize.
Tuning recommendation: Set this parameter after unselect Only Visualize Current Matching Result.