From Depth Map to Point Cloud
Function
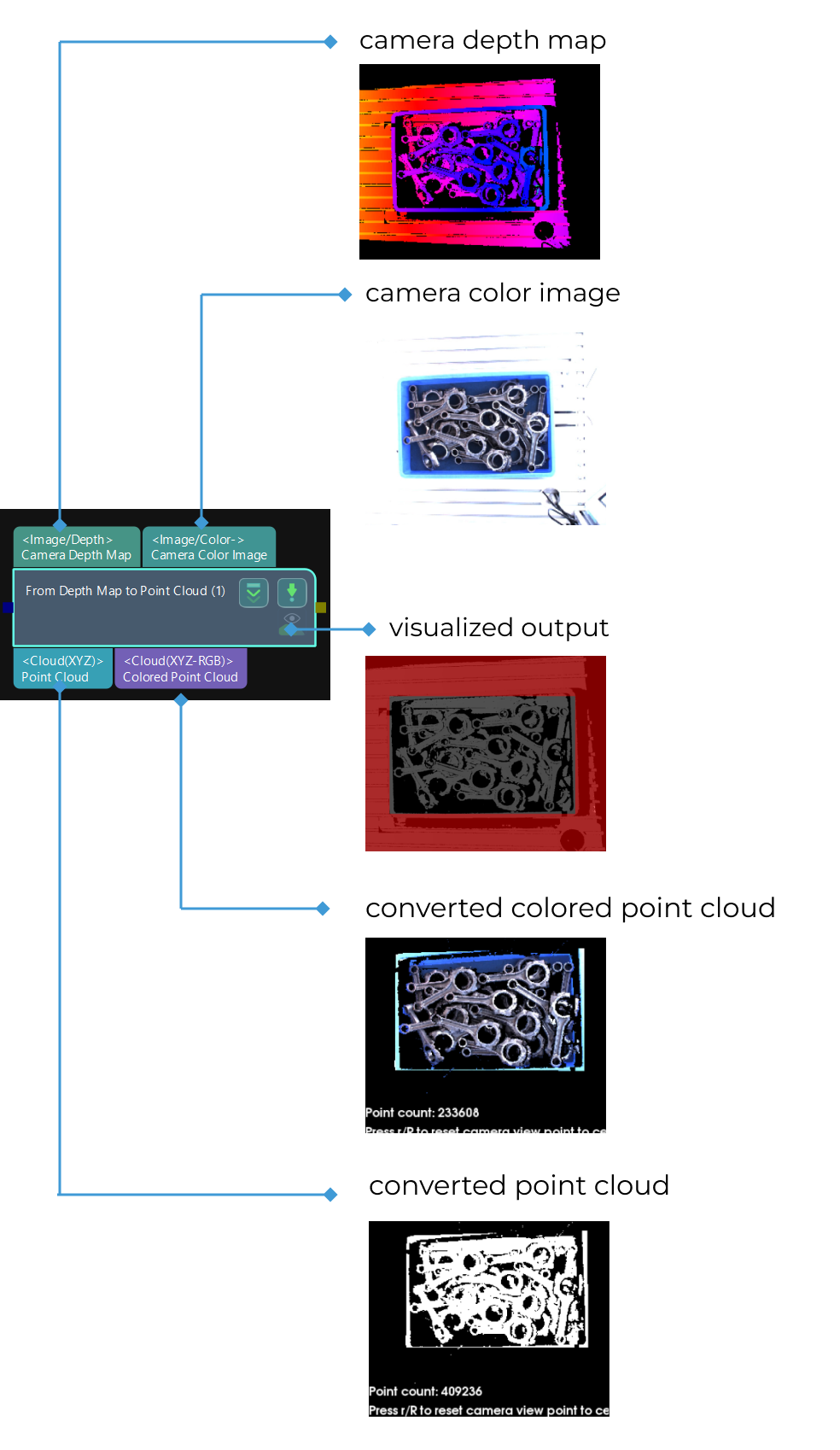
This Step generates a point cloud from a depth map and a corresponding color image.
|
Comparison of Similar Steps: The Step Capture Images from Camera can also directly output point clouds and colored point clouds. However, the Step From Depth Map to Point Cloud features a higher processing speed in this regard. You can set an ROI in the depth map in this Step to lower the quantity of unnecessary point clouds and thus improve the processing speed. |
Usage Scenario
This Step is usually connected after the Step Capture Images from Camera and can generate point clouds from depth maps. You can set an ROI in the depth map in this Step to improve the processing speed.
Parameter Description
- Depth Roi File Name
-
Description: Select an ROI on the depth map.
Example: Select different ROIs.
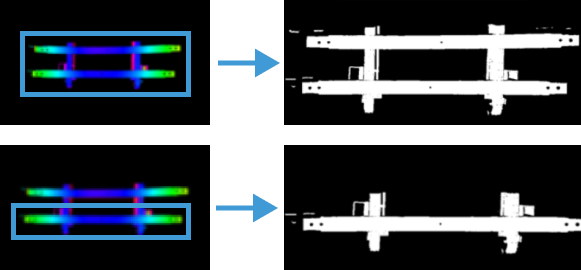
The image on the left shows ROI in an depth map, and the image on the right shows the output point cloud.
Instructions:
-
Click the Set 2D ROI on the right of the parameter Depth Roi File Name to open the Set ROI window.
-
Select an ROI in the window.
-
Click OK to save the setting. A depth_image_roi.json file will be saved to the root directory of the project.
-