From Depth Map to Point Cloud
Function
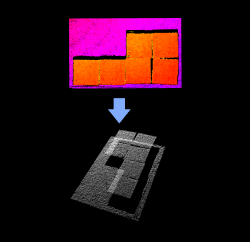
This Step generates a point cloud from a depth map and a corresponding color image.
|
Comparison: The Step Capture Images from Camera can also directly output point clouds and color point clouds. However, the Step From Depth Map to Point Cloud features a higher processing speed in this regard. You can set an ROI in the depth map in this Step to lower the quantity of unnecessary point clouds and thus improve the processing speed. |
Usage Scenario
This Step is usually connected after the Step Capture Images from Camera and can generate point clouds from depth maps. You can set an ROI in the depth map in this Step to improve the processing speed.
Parameter Description
- Depth Roi File Name
-
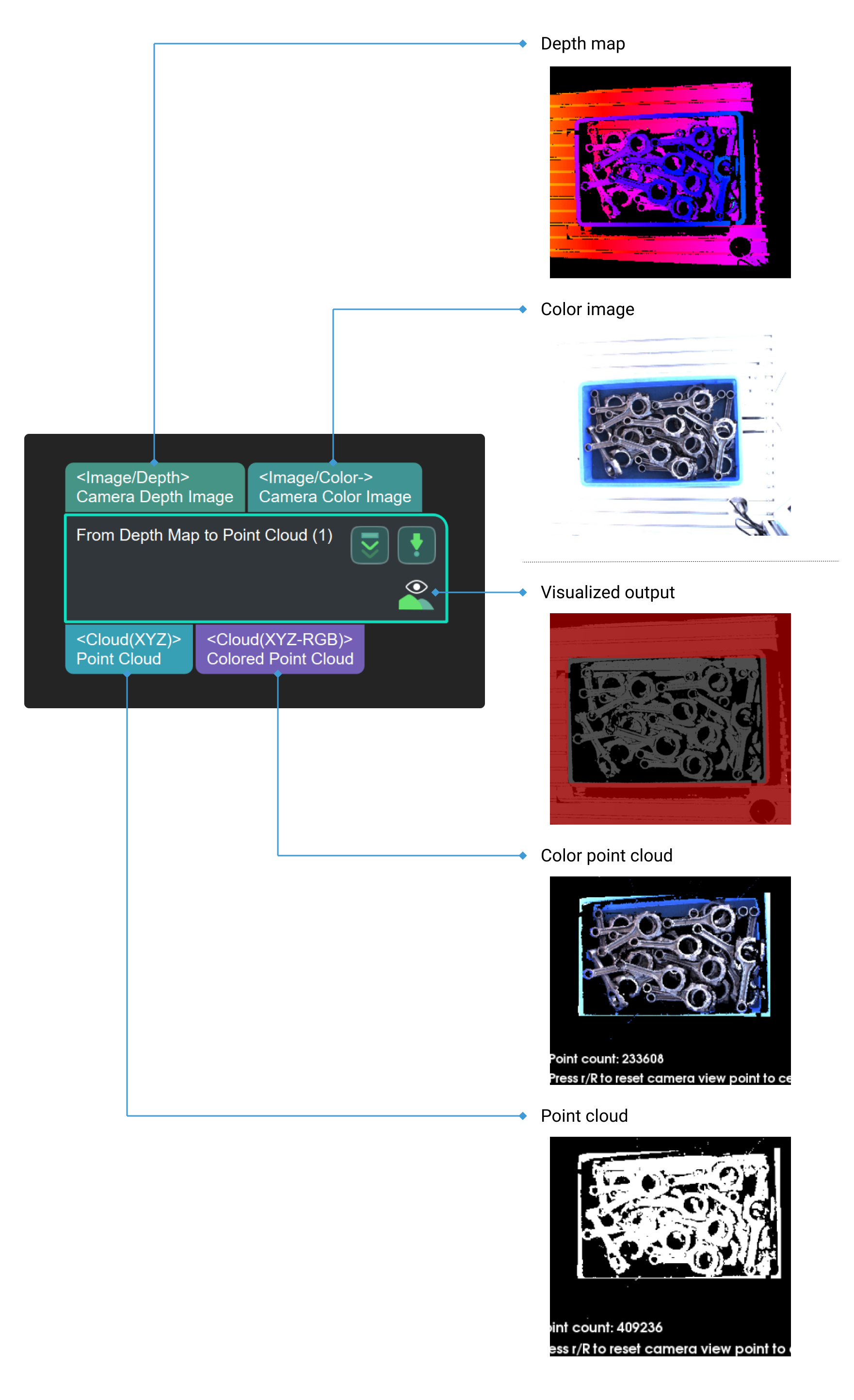
Description: Select an ROI on the depth map.
Example: Select different ROIs.
The image on the left shows ROI in an depth map, and the image on the right shows the output point cloud.
Instructions:
-
Click the Set 2D ROI on the right of the parameter Depth Roi File Name to open the Set ROI window.
-
Select an ROI in the window.
-
Click OK to save the setting. A depth_image_roi.json file will be saved to the root directory of the project.
-
Background Removal Settings
- Remove Background by Depth Image
-
Default setting: Unselected. Description: The following parameters will only be displayed only when Remove Background by Depth Image is selected.
- Depth Background Filename
-
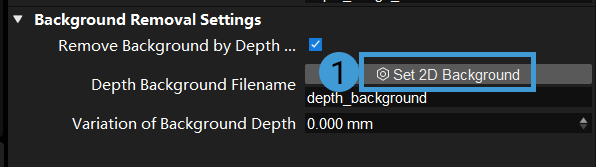
Instructions: Please follow the instructions as follows to set a depth map of the background.
Click the Set 2D Background button on the right of the Depth Background Filename to open the Set Background window.
Click … and then select an image of the background that you have already prepared. Once the message Load background successfully message appears in the Log Messages panel, click OK.

|
You can also connect to the real camera and capture an image of the background on site. |
- Variation of Background Depth
-
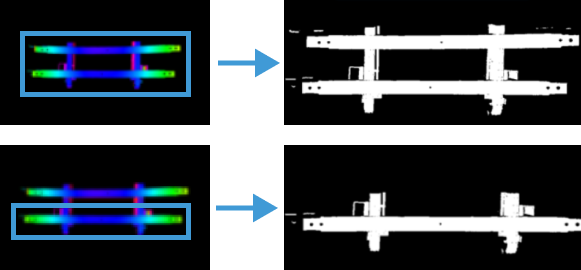
Default setting: 10.000 mm Description: The input depth map will be compared with the depth map of the background, and points with a depth difference from the background lower than this value will be eliminated. Example: In the figure below, the background of image 1 has not been removed; backgrounds of images 2, 3, and 4 have been removed, and the Variation of Background Depth are set to 1 mm, 10 mm, and 30 mm, respectively.
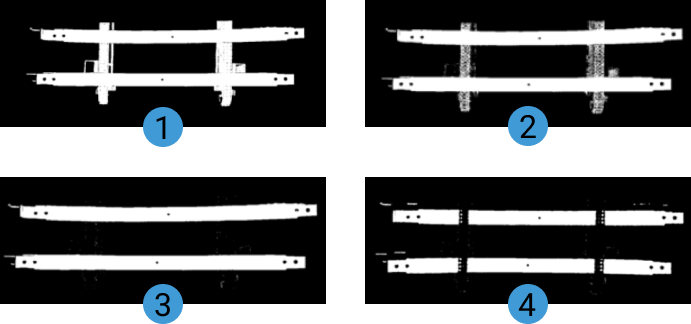
If the value of background depth fluctuation is too small, the background cannot be removed completely. If the value of background depth fluctuation is too large, the point cloud of the object may be removed as well. Therefore, the Variation of Background Depth should be set to a proper value according to actual requirements on site, and 10 mm is recommended to use.