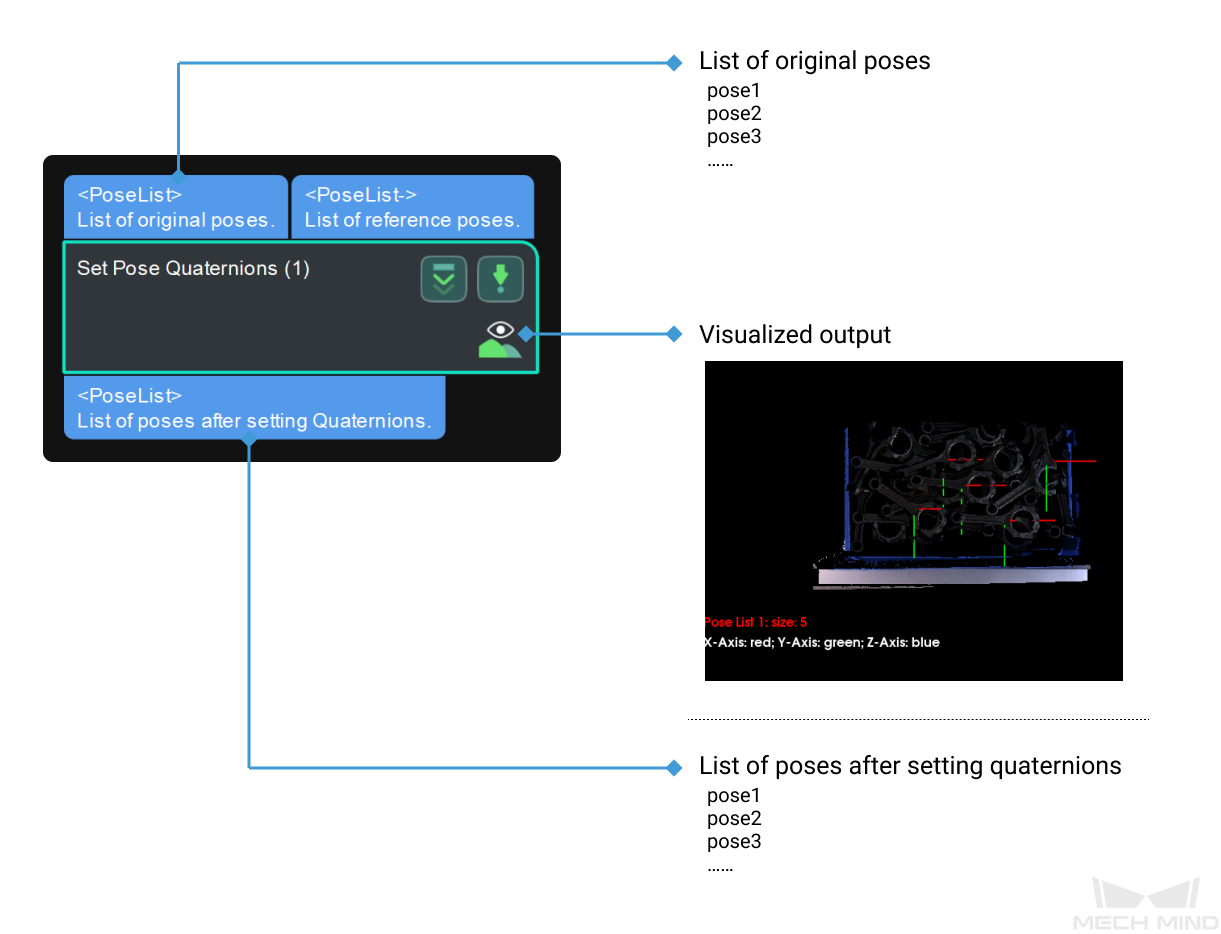
Set Pose Quaternions
|
Contents of this Step are under maintenance. If you need more information about this Step with urgency, please contact us at docs@mech-mind.net. |
Function
Set the orientations of poses (in quaternion) by the reference pose input from the second port, or the quaternion set in the parameter.
Usage Scenario
A general pose quaternion setting Step. If the input reference pose list contains multiple poses, only the quaternion of the first pose will be used.