Set Tag for Branch
Function
Set Tag for Branch should be used in conjunction with Branch by Tag. You can set tags in the workflow, and then select different branch exits according to tags in the subsequent workflow.
| The example projects of the “Set Tag for Branch” Step and “Branch by Tag” Step are provided to help you learn more about branch tags. For the example project, you can go to File > New > Example projects > Others > Branch with Tags in the software. |
Parameter Description
General Parameters of Non-Move Steps
Skip Execution
| None |
Default setting. Do not skip the current Step. |
| Simulation only |
Skip the current Step during simulation. The exit port is specified by Out Port When Skip. |
| Always |
Skip the current Step when the project is simulating or running. The exit port is specified by Out Port When Skip. |
| Instruction |
When Simulation only or Always is selected, the current Step will be skipped and the subsequent Step will be executed when running the project. If this parameter is set to None in “Check DI” Step in the project, and there is no external input signal during simulation, the project will be stopped when executing to this Step. In this case, setting the parameter to Simulation only or Always enables the simulation to continue. |
Out Port When Skip
This parameter will take effect when Skip Execution is set to Simulation only or Always. It specifies the exit port when skipping a Step.
Tag
The number of the tags in the current workflow. This parameter should be set in reference to the Out Port Count parameter of the “Branch by Tag” Step.
The number of the “Set Tag for Branch” Step should be the same as the value of “Out Port Count”. If two “Set Tag for Branch” Steps are used, the “Out Port Count” should be set to 2. Branch tag 1 corresponds to Exit 0 of the “Branch by Tag” Step, Branch tag 2 corresponds to Exit 1 of the “Branch by Tag” Step, and so on.
Application Examples
Example 1
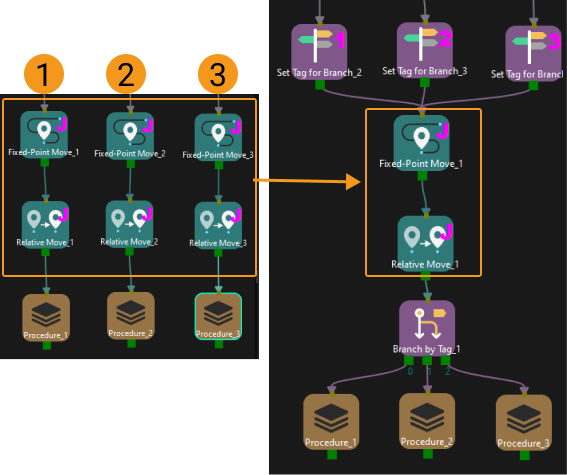
In the following example,
In the three branches (①, ②, ③), there are identical Steps (Fixed-Point Move, Relative Move) with identical parameter settings. Therefore, the “Set Tag for Branch” Step can be used to tag each of the three branches separately. Then, one set of Fixed-Point Move and Relative Move can be applied, followed by using “Branch by Tag” to return to different branches.
Example 2
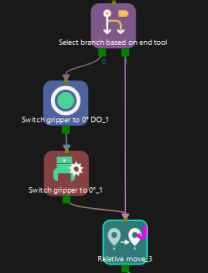
In the “Branch by Tag” example project, the robot will attempt to pick the workobject using two tools at different angles. When placing the workobject, it is necessary to switch back to the angle of 0°.
-
During the picking process, the workflow of picking the workobject with the tool at 30° is tagged as 1, and the workflow of picking the workobject with the tool at 0° is tagged as 2.
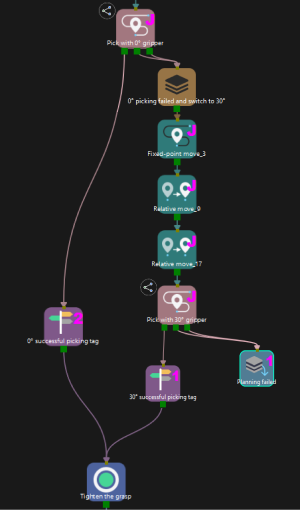
-
During the placement process, the “Branch by Tag” Step determines whether it is necessary to adjust the tool pose based on the tags from the previous workflow, i.e., switching the tool from 30° back to 0°.