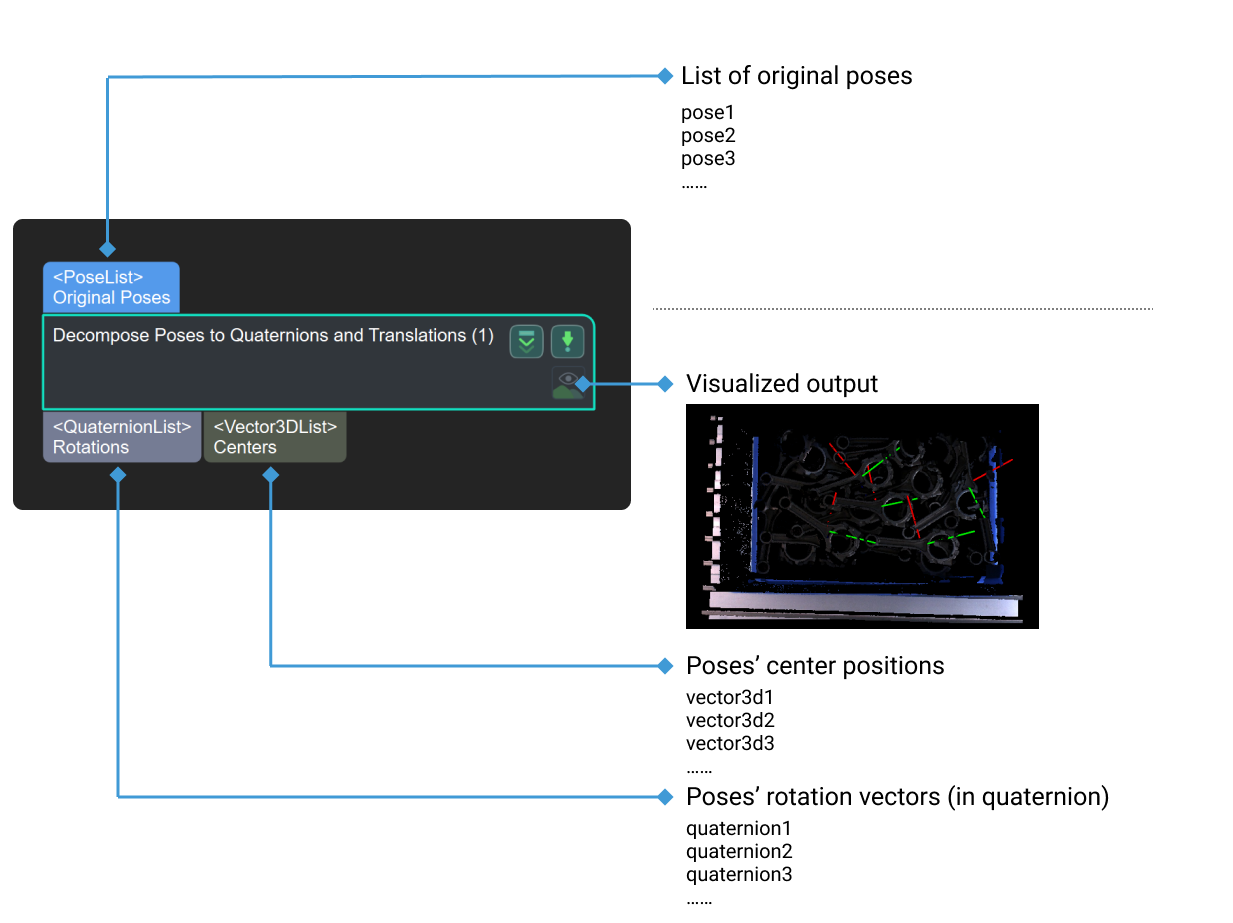
Decompose Poses to Quaternions and Translations
|
Contents of this Step are under maintenance. If you need more information about this Step with urgency, please contact us at docs@mech-mind.net. |
Usage Scenario
A general pose decomposition Step that provides data sources for subsequent Steps that require rotation vector and pose center data types.