Analyze Extrinsic Parameter Error in EIH Setup
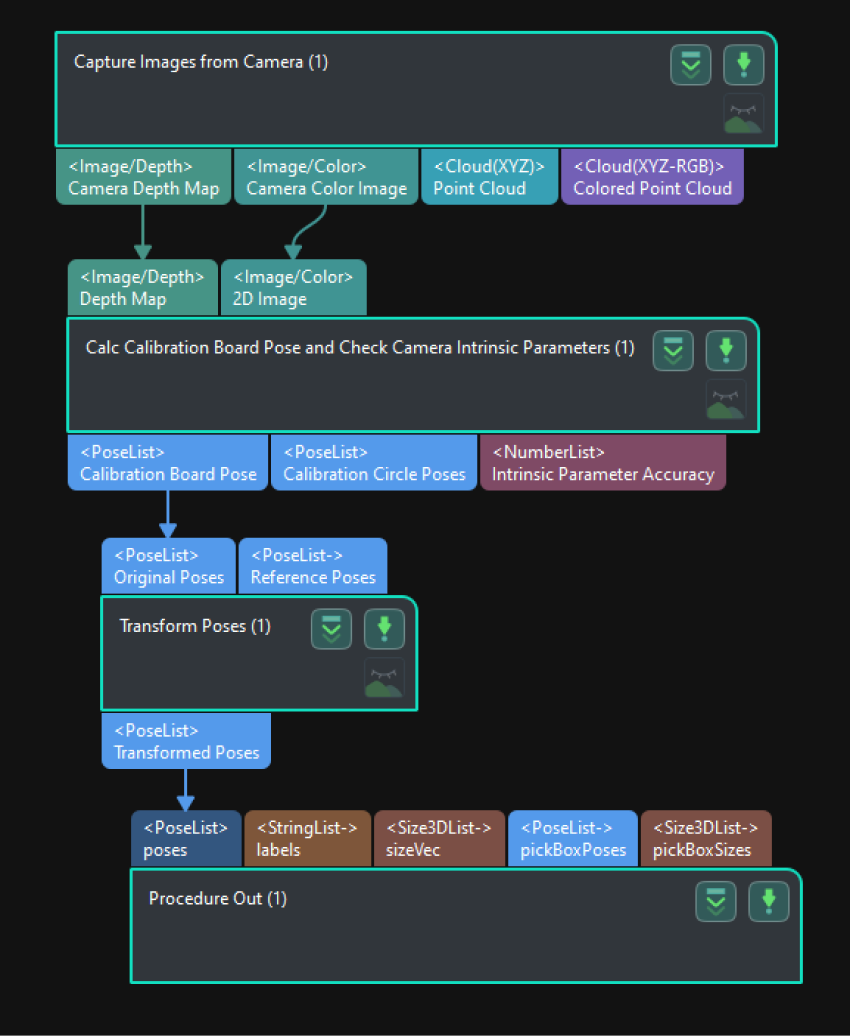
Build Project to Obtain Calibration Board Poses
-
Add the “Capture Images from Camera” Step.
Create a new project and add the “Capture Images from Camera” Step, or select the Step in an opened project. Click the Select camera button in the Step Parameters panel to select and connect the camera. Then select the Camera Calibration Parameters to be checked.
-
Add the “Calc Calibration Board Pose and Check Camera Intrinsic Parameters” Step.
Add the “Calc Calibration Board Pose and Check Camera Intrinsic Parameters” Step and connect it with the “Capture Images from Camera” Step.
-
Add the “Transform Poses” Step.
Add the “Transform Poses” Step and set Transformation Type to “CameraToRobot.” Then connect the “Calc Calibration Board Pose and Check Camera Intrinsic Parameters” Step with this Step.
If you are using a gantry robot, please replace the “Transform Poses” Step with the “Transform Poses for Truss” Step.
-
Add the “Procedure Out” Step.
Add the “Procedure Out” Step, set Port Type to “Predefined (vision result),” and connect the “Transform Poses” Step with the “Procedure Out” Step to output the calculated pose of the calibration board.
The built project is shown as below.
-
Run the project and check the result.
Run the project and check the calculation result of the calibration board pose in the Log panel at the bottom.
Robot Carries the Camera to Capture Images of the Calibration Board from Different Positions
The robot carries the camera and moves to different positions in the workspace. It is recommended to include both translation and rotation in the movement. The camera will capture images after the project is run, and then the pose data of the calibration board will be recorded and used to analyze the extrinsic parameter error.
Add Poses and Analyze Error
-
Click + to add more poses.
-
Click Analyze error to view the result.
If the error is too large, please add fixed waypoints near positions that require high accuracy, and then capture the images of the calibration board and analyze the error again. For example, add a waypoint near the image-capturing position or pick point. In this way, when the robot reaches that waypoint from a distance, the picking error due to poor repeatability can be reduced.