Classify
Function
This Step is used before or after Vision Look to choose different branches according to the workobject labels identified by Mech-Vision.
Usage Scenario
This Step is used to classify the workobject labels identified by Mech-Vision.
-
Before “Vision Move”: The default picking process: Identify the workobject > Select and operate on different branches according object’s labels > Pick workobjects with the label. Example: Change the gripper for different workobjects.
-
After “Vision Move”: The default picking process: Identify the object > Pick the object > Operate differently according to the types of workobjects. Example: Use the same gripper to pick and place workobjects into different bins after classification.
Parameter Description
General Parameters of Non-Move Steps
Skip Execution
| None |
Default setting. Do not skip the current Step. |
| Simulation only |
Skip the current Step during simulation. The exit port is specified by Out Port When Skip. |
| Always |
Skip the current Step when the project is simulating or running. The exit port is specified by Out Port When Skip. |
| Instruction |
When Simulation only or Always is selected, the current Step will be skipped and the subsequent Step will be executed when running the project. If this parameter is set to None in “Check DI” Step in the project, and there is no external input signal during simulation, the project will be stopped when executing to this Step. In this case, setting the parameter to Simulation only or Always enables the simulation to continue. |
Get Label from “Update Held Workobject”
| Selected |
An Update Held Workobject Step should be used before this Step, and this Step can acquire the label information of the currently picked workobject and then perform operations according to the classification. Usage Scenario: The label information of the detected workobjects cannot be acquired directly due to the overlapped workpieces or other reasons; therefore, the held workpieces should be re-classified, and then corresponding labels can be output. |
| Unselected |
The default setting. Use the object labels detected by Mech-Vision. Please select the corresponding Vision Move Step for Classify before “Vision Move”. |
Load Labels & Add a label
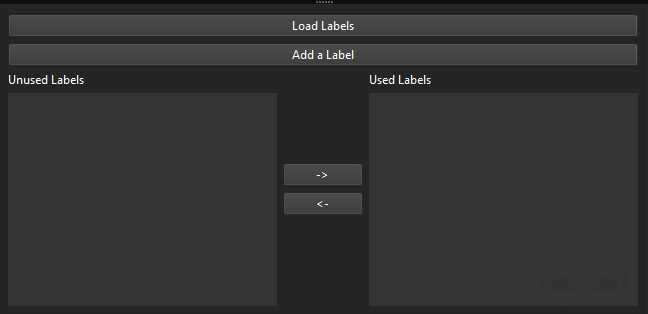
| Load Labels |
Add multiple labels to Unused Labels at once. Click Load Labels and select a JSON file with multiple labels, as shown below. After that, all label files will be added to Unused Labels, and all the previous labels in both the Unused Labels and the Used Labels will be deleted. 
|
| Add a label |
Add a label named unnamed_label to Unused Labels. You can double-click the label to re-name it. |
| Label list |
The label list includes Unused Labels and the Used Labels. You can shift the label’s place between the two spaces by clicking The Used Labels will appear at the exit port of this Step. There will be a label named Other to filter out labels that are not in the Used Labels space. |

