Check Pose Repeatability by Statistics
Function
This Step is used to evaluate the stability of the poses in the vision projects.
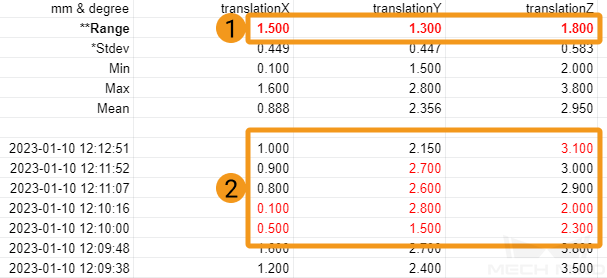
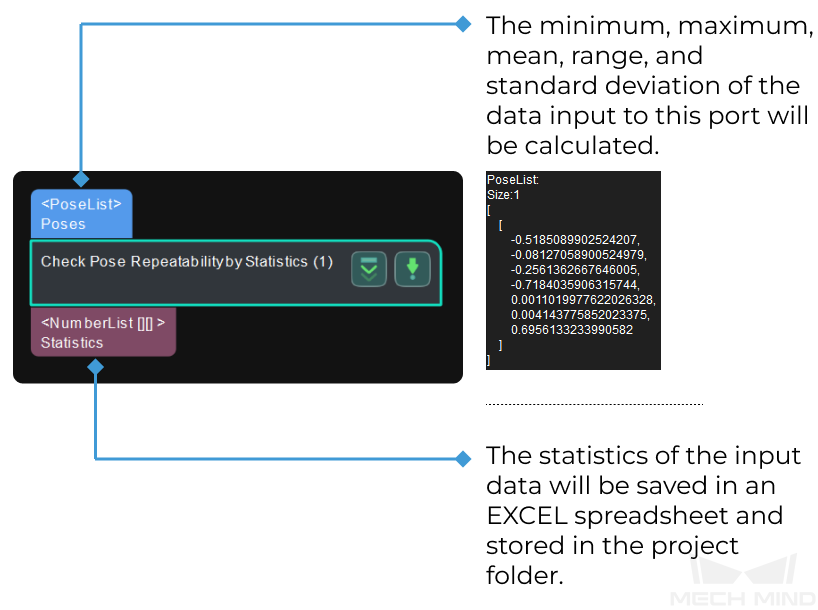
In the actual application, the camera will capture 10–20 images on the same workpiece at each position first, and this Step will calculate the minimum, maximum, mean, range, and standard deviation of the workpiece poses at each position, and then you can determine whether the project runs stably according to the statistics.
|
No matter whether the camera is mounted in the eye-in-hand or eye-to-hand mode, images of the workpiece at different positions should be captured to verify the pose stability at different positions. However, when the camera captures 10–20 images at the same position, the relative position between the camera and the workpiece should not change.
|
Usage Scenario
This Step can be used to evaluate the robustness of the camera or verify the effectiveness of the vision project parameter tuning.
It can follow 3D matching Steps to evaluate the robustness of matching. You can also connect it before the Procedure Out Step in a project to verify the stability of positioning and recognition deviation. In the latter case, please keep the workpieces unmoved and then capture images.
After running the project, this Step will output the statistics spreadsheet to a specified directory. You can check the statistics of X, Y, Z values of the poses and X, Y, Z values of Euler angles in this file.
Parameter Description
Data for Making Statistics
- Input Data Type
-
Description: This parameter is used to select the input data type which corresponds to the input port.
Value list: PoseListInput, NumberListInput.
-
PoseListInput: Input one or more pose lists.
-
NumberListInput: Input other data.
Default value: PoseListInput
Tuning recommendation: Please select the input data type according to the actual requirement. Please refer to the tuning example for the corresponding result.
-
- Output Data Type
-
Description: This parameter specifies the output data type.
Default value: Statistics of spatial positions and Euler angles.
Tuning recommendation: This parameter does not need any adjustment. Please keep the default setting.
- Position Coordinate Deviation Range (0–1000)
-
Description: This parameter specifies the acceptable upper limit of position coordinate deviation, in mm. If the difference between the maximum and the minimum exceeds this threshold, an error may be reported according to the setting of the Outlier Handling parameter. This checking process is performed independently for the X, Y, and Z coordinates.
Value range: 0–1000
Default value: 1.0 mm
Tuning instruction: Please set the value according to the actual requirement. Please refer to the tuning example for the corresponding result.
- Euler Angle Deviation Range (0–360)
-
Description: This parameter specifies the acceptable upper limit of Euler angle deviation, in °. If the difference between the maximum and the minimum exceeds this threshold, an error may be reported according to the setting of the Outlier Handling parameter. This checking process is performed independently for the α, β, and γ values.
Value range: 0–360
Default value: 0.100°
Tuning instruction: Please set the value according to the actual requirement. Please refer to the tuning example for the corresponding result.
Statistics Saving
- Restart
-
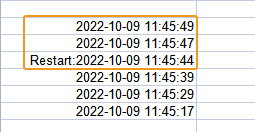
Description: When the workpiece’s position changes or outliers occur in the statistics, this parameter is used to determine whether to recollect the statistics. Once this option is selected, the output data will be marked as “Restart”. In the statistics file, data collected before the “Restart” mark will be excluded from the statistics and shown in gray.
Default Value: unselected.
Tuning recommendation: If you want to recollect the statistics, select this option. Please refer to the tuning example for the corresponding result.
-
After the Step successfully executes again, this option will be reset to unselected automatically.
-
If this option is not selected, the outlier will remain in the saved statistics.
-
- Outlier Handling
-
Description: This parameter is used to specify how to handle outliers when they occur in the statistics.
Value list: Raise Error on Outlier, Record and Mark Outlier.
-
Raise Error on Outlier: An error will be immediately reported when an outlier is detected and the outlier will not be recorded. The possible three causes of the error are as follows.
-
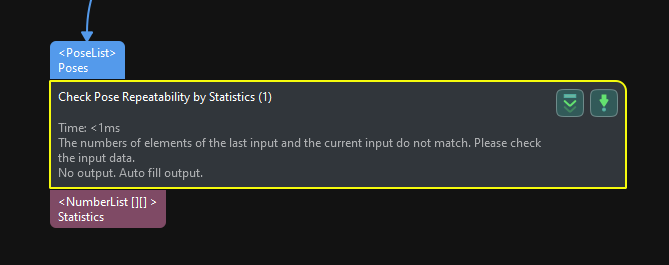
The number of elements in the data is inconsistent. In this case, you can try to use the Unpack Data Step to fix the problem.
-
The position coordinate deviation or Euler angle deviation exceeds the set threshold. In this case, you can try to adjust the Position Coordinate Deviation Range and Euler Angle Deviation Range parameters.
-
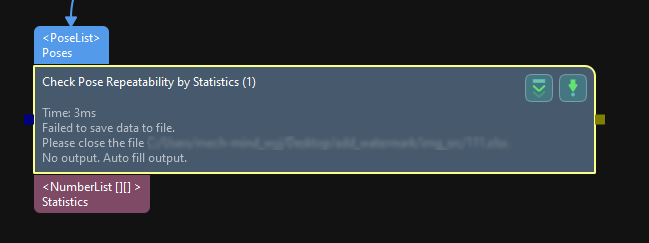
The statistics file has been opened and the new data cannot be saved. In this case, please close the statistics file and re-run the project.
-
-
Record and Mark Outlier: No error will be reported if an outlier occurs. The outlier will be recorded in the file and marked in red, and it will also be included in the statistics.
Default value: Raise Error on Outlier.
Tuning instruction: Please set the value according to the actual requirement. Please refer to the tuning example for the corresponding result.
-
- Number of Decimal Places
-
Description: This parameter specifies the number of decimal places used for the statistics.
Default value: 3
Value range: 0–8
Tuning instruction: Please set the value according to the actual requirement.
- File Base Name
-
Description: This parameter is used to set the name of the statistics file. If you do not name the file, the output file will be named “posesStatistics” by default. If you modified the file base name, the Restart parameter will be automatically selected and the statistics will be recollected.
Default setting: none.
Tuning instruction: Please set the value according to the actual requirement.
If the position of the workpiece changes, or outliers occur in the statistics, you can select Restart and reset the File Base Name to re-create a statistics file to record the data.
- Saving Directory Path
-
Description: This parameter specifies the saving directory of the statistics file. If you do not select the saving directory, the statistics file will be saved in the project folder by default.
Default setting: none.
Tuning recommendation: Click the
 button to choose a saving directory.
button to choose a saving directory.
Tuning Examples
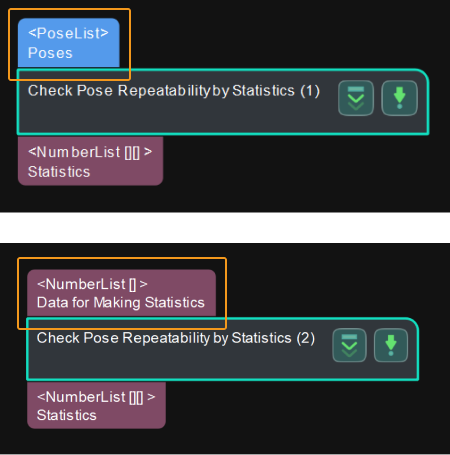
Input Data Type
As shown below, when different Input Data Types is selected, the input port of the Step will change accordingly.
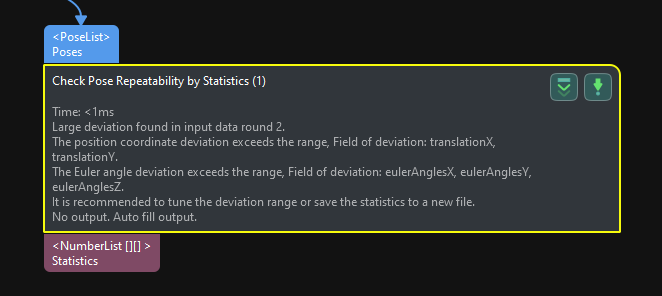
Position Coordinate/Euler Angle Deviation Range
When the difference between the current set of data and the last set of data exceeds the set value, an error message as shown below will appear on the Step.
Restart
When Restart is selected, data collected after the “Restart” mark (including the data with the Restart mark) will be included in the calculation while the data collected before the “Restart” mark will be excluded and shown in gray in the statistics file.