Robot Configurations
| Axes | Six | Six | |
|---|---|---|---|
Types of Configuration |
Name |
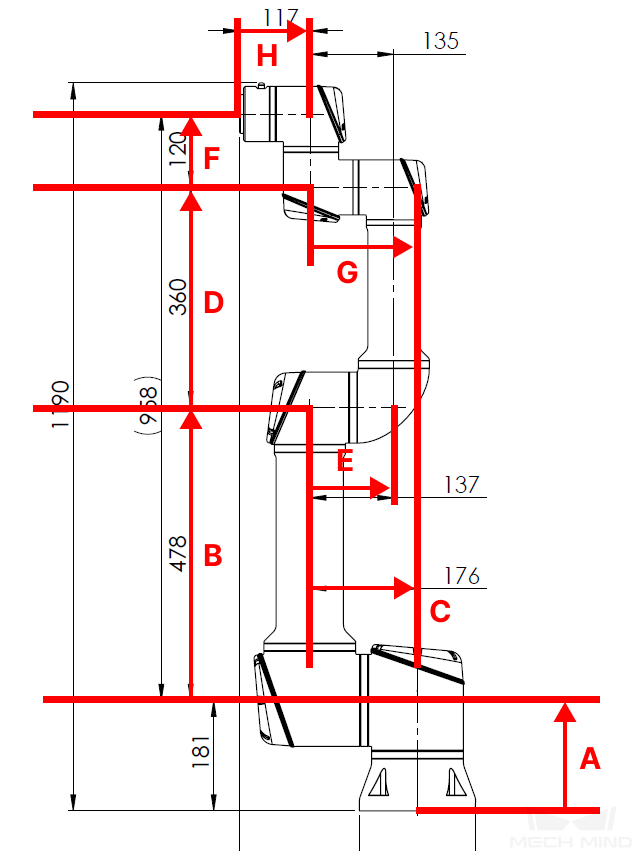
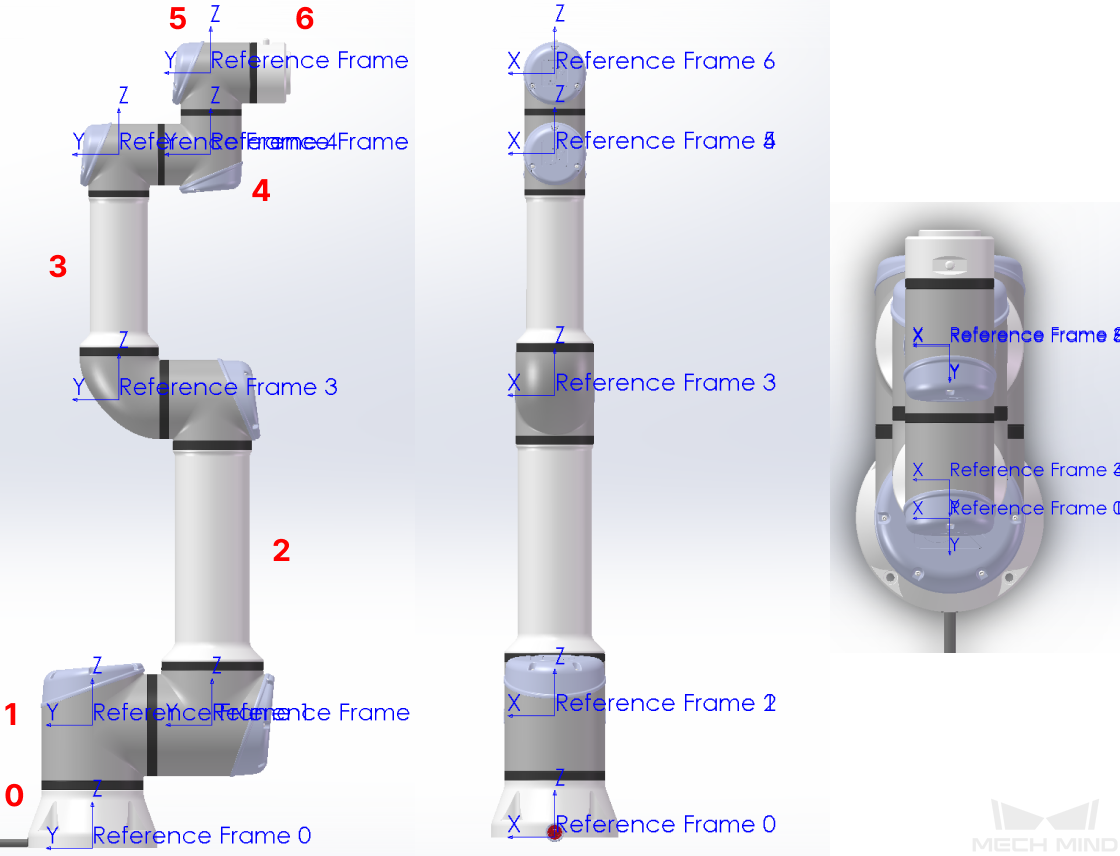
UR_UR5_Like |
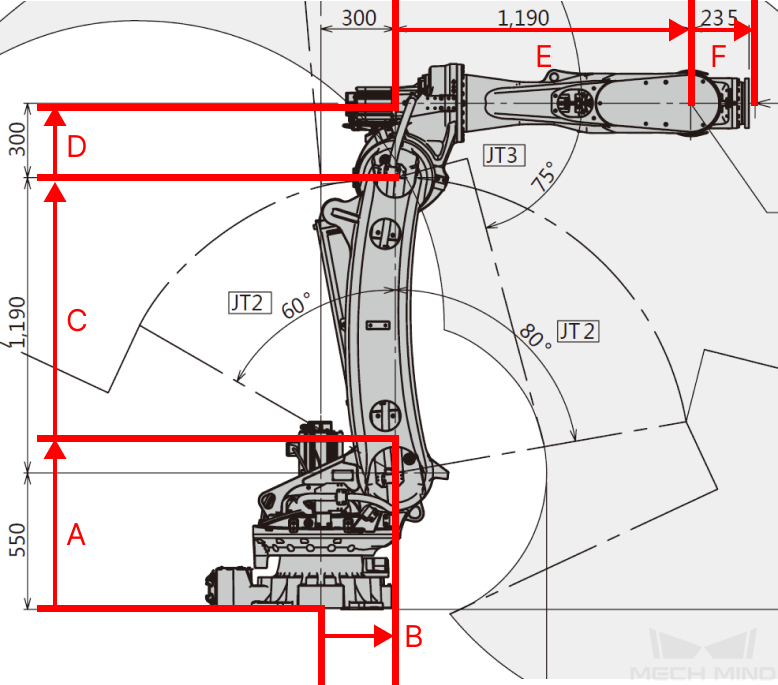
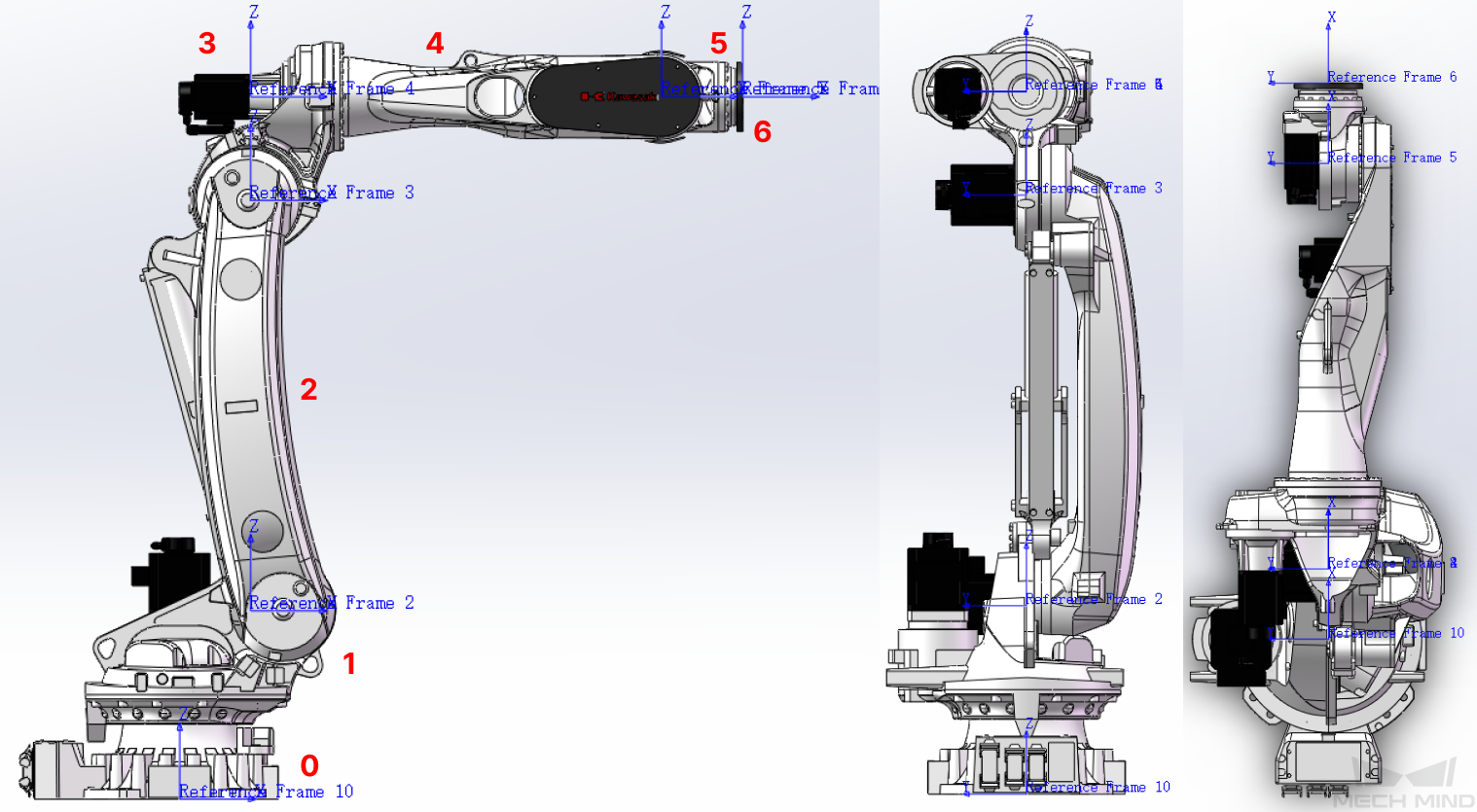
SphericalWrist_SixAxis |
Description |
6 axis collaborative robot |
Common split-ball type wrist industrial robot |
|
Illustrations |
DH Specification |
|
|
Reference frame and axis No. |
|
|
|
Interpretation |
0: Reference frame 10; 1: Reference frame 10; 2: Reference frame 2; 3: Reference frame 3; 4: Reference frame 4; 5: Reference frame 5; 6: Reference frame 6; |
||
[robot]_algo example |
|
|
|