Cloud Processing (GPU)
|
This Step is outdated. Please use the newer Step Calc Normals of Point Cloud and Filter It instead. If you need more information about this Step with urgency, please contact us at docs@mech-mind.net. |
Usage Scenario
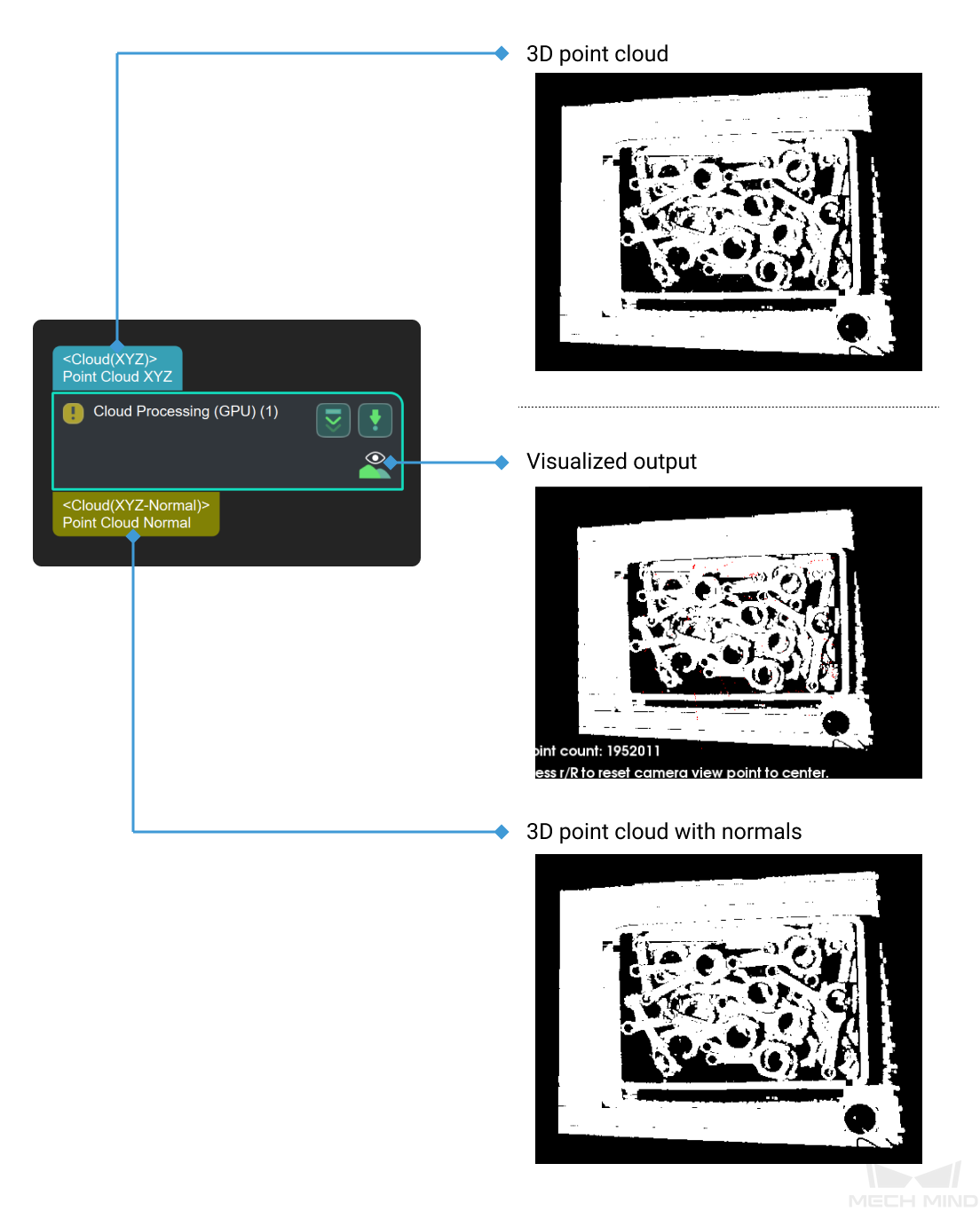
This Step is used to add normals to the original point cloud and remove outliers. It usually follows Steps Capture Images from Camera and From Depth Map to Point Cloud.
Parameter Description
- Calculation Settings
- Is Batched
-
Description: This parameter is used to determine whether to process the point clouds in batches.
Default setting: unselected.
Suggestion: When there are too many points in a point cloud, and the video RAM is not enough to process them, it is recommended to select this option.
- Radius for Normal Calculation
-
Description: This parameter is used to set the search radius for normal calculation.
Default value: 5.000 mm
- Removal of Sparse Points
- Remove Sparse
-
Description: This parameter is used to determine whether to remove the sparse points in point clouds.
Default setting: unselected.
Instruction: When it is selected, sparse points can be removed according to the set threshold of sparse points.