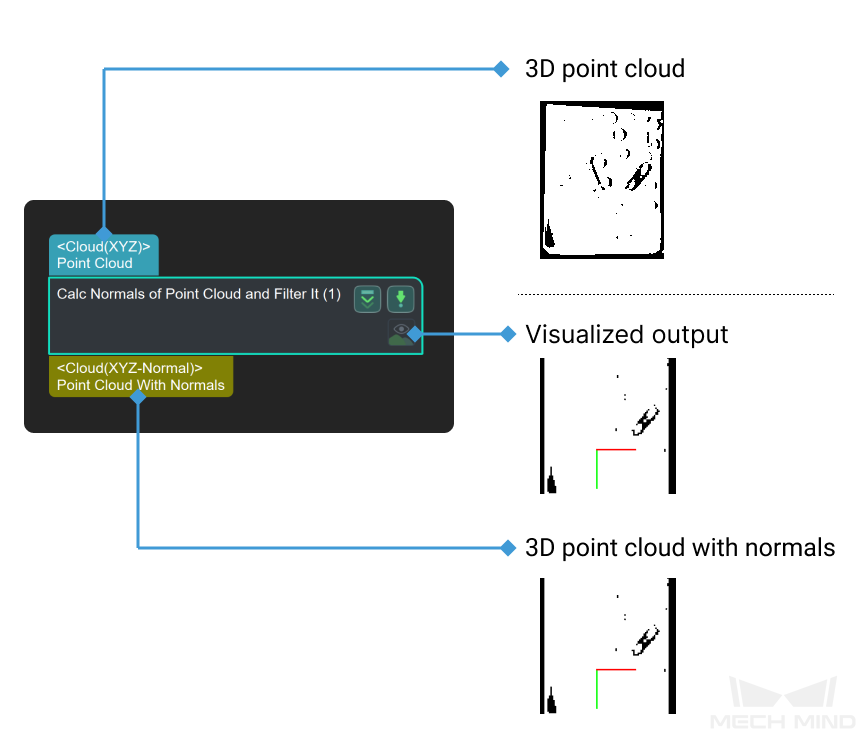
Calc Normals of Point Cloud and Filter It
|
Contents of this Step are under maintenance. If you need more information about this Step with urgency, please contact us at docs@mech-mind.net. |
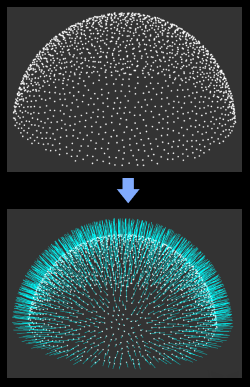
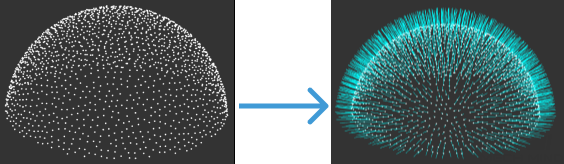
Usage Scenario
This Step is used to add normals to the original point cloud and remove outliers. It usually follows Steps Capture Images from Camera and From Depth Map to Point Cloud.