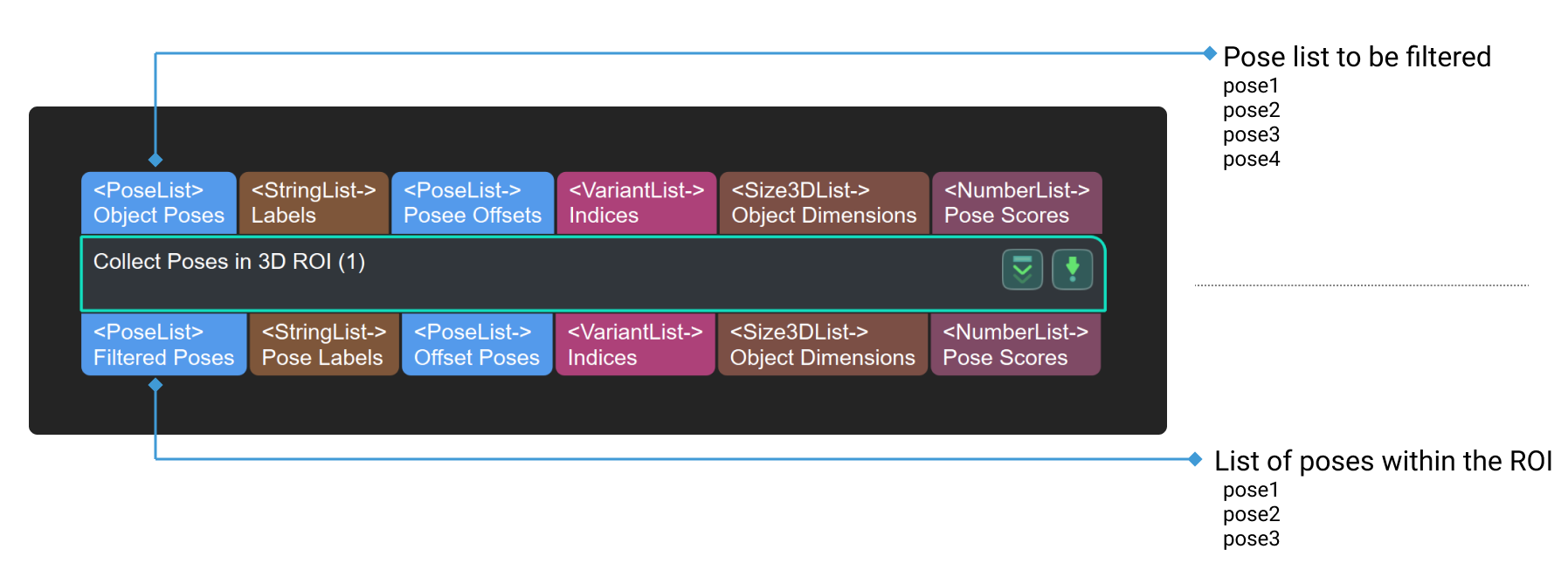
Collect Poses in 3D ROI
|
This Step is outdated. Please use the new Step Validate Existence of Poses in 3D ROI instead. If you need more information about this Step with urgency, please contact us at docs@mech-mind.net. |
Function
Filter the input pose list by the set 3D ROI. The poses inside the ROI will be retained, and the poses outside the ROI will be discarded.
Parameter Description
3D ROI Settings
- Set 3D ROI
-
Description: This parameter is used to set 3D ROI.
Instruction: Click Set 3D ROI and set the background in the pop-up window of Set ROI.
- Input Poses Coordinate Type
-
Description: This parameter is used to select the type of reference frame in which the input poses are located.
Options: Robot Coordinate, Camera Coordinate.
Default setting: Robot Coordinate.