2D相机内参标定
相比于Mech-Eye 3D相机,外置2D相机在实际应用中,往往需要通过调整镜头上的调焦环来调整像距,此时2D相机的内参较出厂时已经发生了较大变化,因此在使用2D相机前需标定内参与外参。
本操作指南介绍如何完成外置2D相机的内参标定。
标定前准备
在进行手眼标定前,你先需要完成如下准备工作:
-
完成梅卡曼德视觉系统的搭建。
-
准备标定所需物料。
-
调整标定板点云成像。
-
完成机器人通信配置。
完成视觉系统的搭建
请参照视觉系统硬件搭建章节完成梅卡曼德视觉系统的搭建。
手眼标定需要使用Mech-Eye Viewer、Mech-Vision和Mech-Viz软件。请确保上述软件已经安装并更新到最新版本。
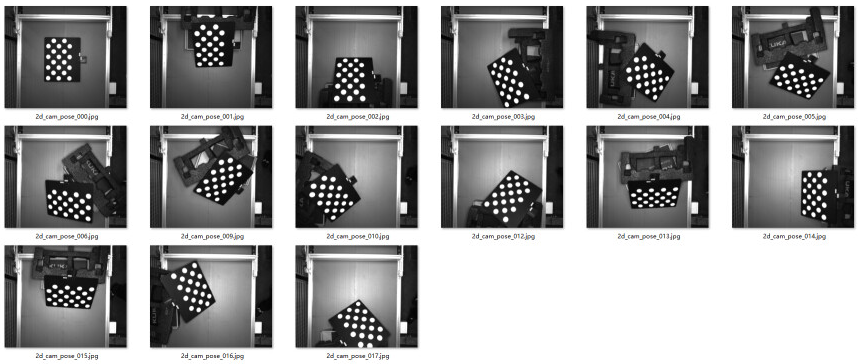
准备标定所需物料
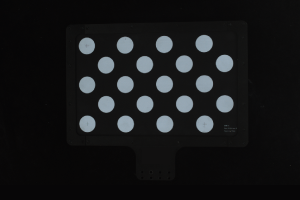
内参标定需要使用标定板。
请按照如下要求准备标定板:
-
请确保标定板上圆清晰,没有明显刮花痕迹,标定板没有明显弯曲变形。
-
当精度要求大于±1mm时,内、外参标定可使用相同的标定板。在相机工作距离内,选择覆盖相机视野尽可能大的BDB标定板即可。

标定预配置
-
打开Mech-Vision软件,在工具栏上单击相机标定按钮。标定预配置窗口将弹出。
-
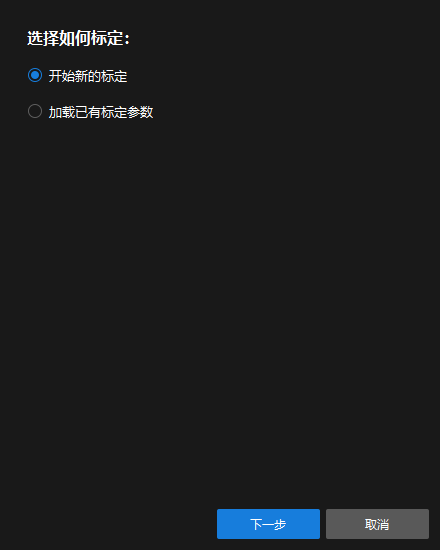
在选择如何标定窗口,选择开始新的标定单选框,然后单击下一步按钮。
-
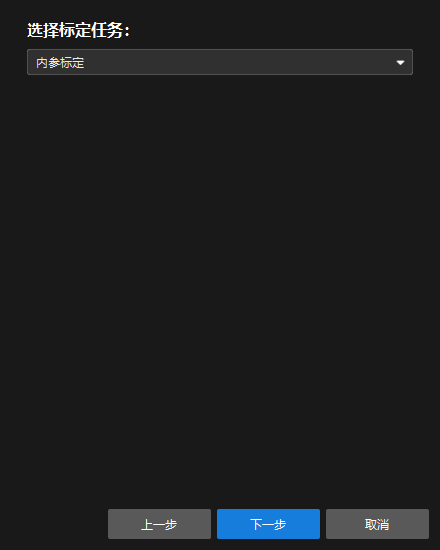
在选择标定任务窗口,从下拉列表框中选择内参标定,然后单击下一步按钮。
-
在选择相机类型和操作模式窗口,选择相机视野关系为2D及深度视野相同,标定模式为标准,然后单击开始标定按钮,标定(内参)窗口将弹出。
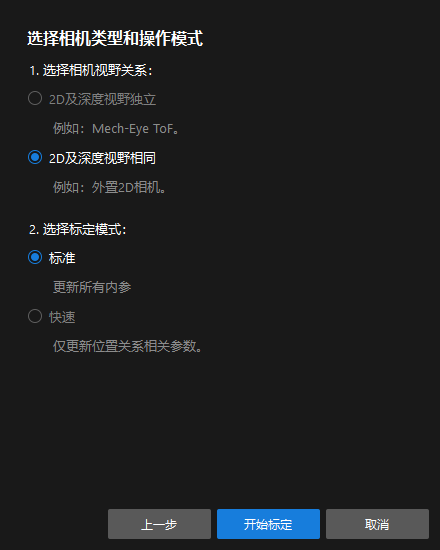
至此,标定预配置已完成,将进入正式标定流程。
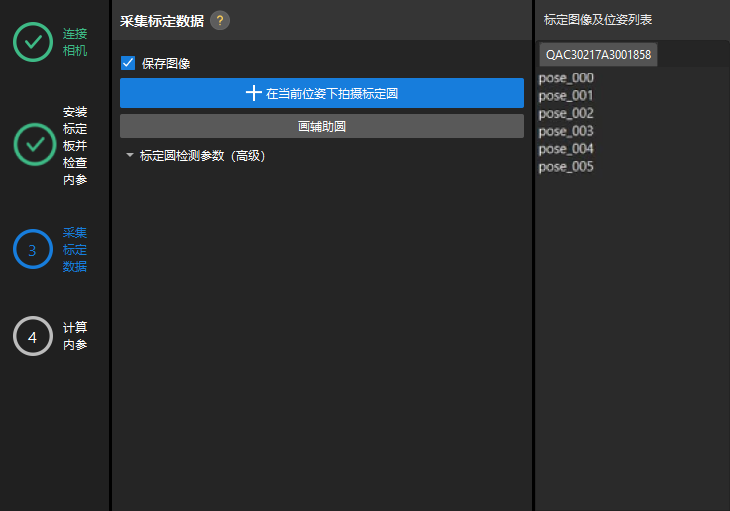
标定流程
连接相机
-
在连接相机步骤,在相机列表中选中需要连接的2D相机,然后单击
 即可连接相机,或者直接双击需要连接的相机。
即可连接相机,或者直接双击需要连接的相机。
-
连接相机后,可以选择连续采集或者单次采集按钮。

-
在图像视图面板中,确定相机能够正常采集图像,然后在底部栏单击下一步按钮。



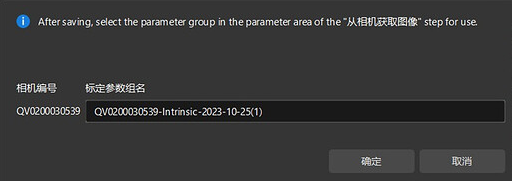
切换内参文件
-
进入Mech-Eye相机标定流程。
-
在安装标定板并检查内参步骤中,单击检查相机内参。
-
弹出的窗口中提示输入预先标定好的内参文件,然后单击OK,选择标定文件夹中的intri_param.json文件。
至此,即完成了内参文件的切换。