兼容模式说明
兼容模式下,部分机器人存在以下情况:当真实机器人与软件仿真界面上机器人位姿同步时,机器人示教器上的工具位姿数值与软件界面上显示的工具位姿数值不对应。 存在此问题的已知机器人有:FANUC 四五六轴全系列、YASKAWA 四五六轴全系列、KAWASAKI 六轴 R 系列、史陶比尔六轴全系列、遨博全系列、大族全系列。
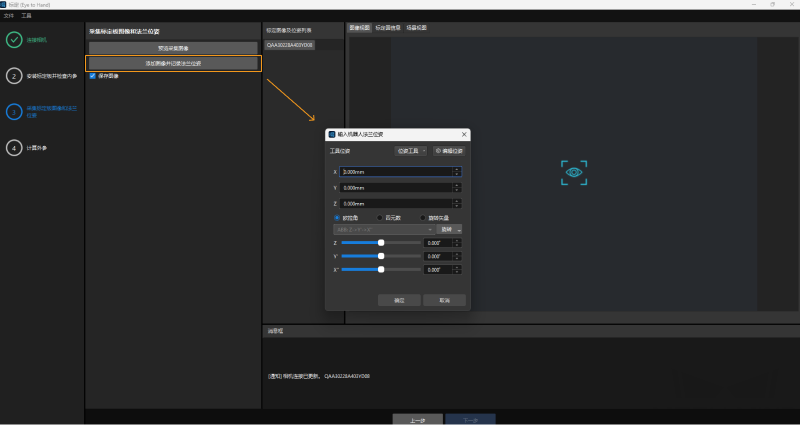
兼容模式下软件通过标准接口或主控与机器人通信时会自动补偿这部分差值。但进行手动标定、示教抓取点,或将规划、识别出的结果以工具位姿形式通过 Adapter 发送到机器人时,工具位姿的差值需要人为补偿。
哪些场景下需要去手动补偿
| 当你使用的机器人为 FANUC 四五六轴全系列、YASKAWA 四五六轴全系列、KAWASAKI 六轴R系列、史陶比尔六轴全系列、遨博全系列、大族全系列,在手动标定、示教抓取点、Adapter 通信过程中,需要手动添加补偿值。 |
如何获取补偿值
可通过下述方法获取补偿值:
-
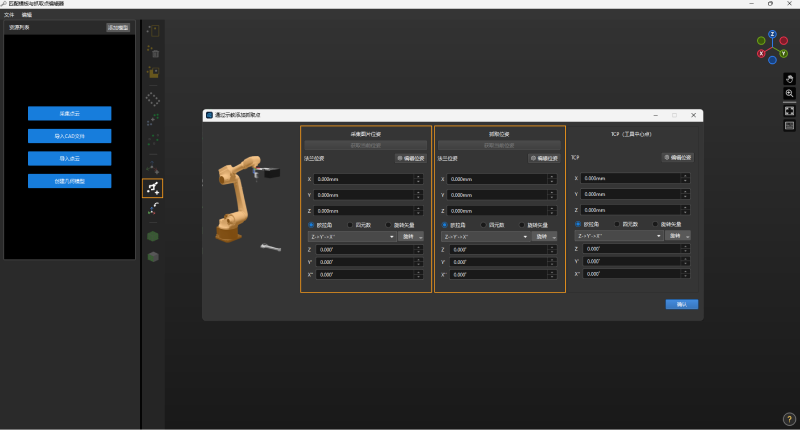
通过将真实机器人和软件仿真空间中对应机器人同步,检查示教器显示的机器人工具位姿和软件中显示的机器人工具位姿中 Z 的差值,即为补偿值。
以下表所示机器人为例。
|
|
示教器中显示的工具位姿 |
Mech-Viz中显示的工具位姿 |
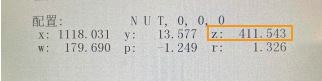
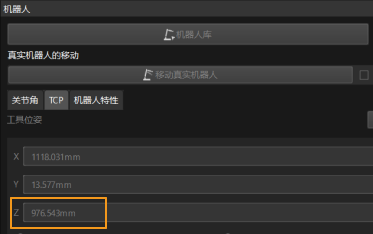
示教器中显示的工具位姿 Z 值为 411.543,Mech-Viz 中显示的工具位姿 976.543,故补偿值为 976.543 - 411.543 = 565mm。
-
通过查看机器人参数文件,读取 dh 参数的第一个值(dh1),或读取参数文件中 Zoffset 的值,即为补偿值。
以下表所示机器人为例。
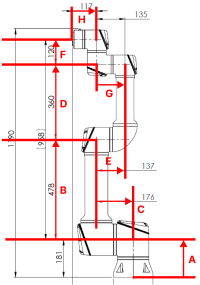
通过 UR_16E_algo.jso 我们可以得知 dh1 为 A,通过 dh 参数图可以得知 A 为 181mm,所以补偿值为 181mm。
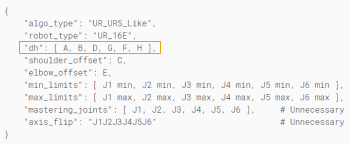
UR_16E_algo.json
dh 参数图