输出
输入与输出
作为工程中的结果输出类步骤,该步骤无输出端口,仅存在输入端口,且有四种输出类型:抓取类视觉结果、轨迹类视觉结果、抓取类机器人路径和自定义,不同的输出类型对应不同的数据输入端口。
|
所有默认端口均必须连接有效的输入数据,否则运行“输出”步骤时会报错。 |
输出类型与说明如下。
| 输出类型 | 描述 |
|---|---|
抓取类视觉结果 |
输出与工件定位和抓取相关的识别结果,用于后续机器人执行抓取任务。 |
轨迹类视觉结果 |
输出沿工件表面或边缘生成的轨迹结果,用于后续机器人执行轨迹任务。 |
抓取类机器人路径 |
输出“路径规划”步骤规划的机器人路径。 |
自定义 |
用于按需自定义输入端口并发送指定数据。 |
以“抓取类视觉结果”输出类型为例,输入端口可参考下表。
| 输入端口 | 数据类型 | 描述 |
|---|---|---|
抓取点 |
Pose[] |
工件抓取点列表。 |
抓取点信息 |
JsonValue |
抓取点相关信息,包括工件名称、抓取点名称、抓取点标签等。 |
点云 |
PointCloud[] |
发送给Mech-Viz的点云。 |
抓取点标签 |
String[] |
工件库中工件抓取点的标签,通常用于标准接口通信时与上位机的标签通信。 |
工件尺寸 |
Size3D[] |
工件的尺寸。 |
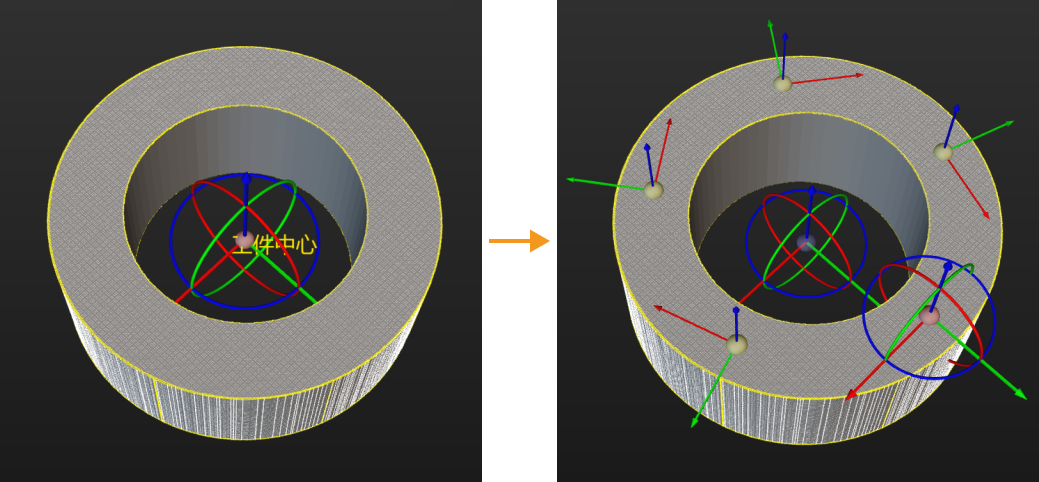
抓取点偏置 |
Pose[] |
抓取点相对于工件中心点的偏置。 |
场景物体名称 |
String[] |
场景物体名称列表,列表中物体的尺寸和位姿将被更新。 |
场景物体尺寸 |
Size3D[] |
场景物体尺寸列表,将按照列表中的顺序更新场景物体尺寸。 |
场景物体位姿 |
Pose[] |
场景物体位姿列表,将按照列表中的顺序更新场景物体位姿。 |
自定义端口 |
Abstract[]n |
根据“自定义端口名”动态生成的输入端口数据。 |
|
当使用的是用工件库“无需点云模板”流程保存的工件时,步骤输出的抓取点与输入的抓取点一致。 |
参数说明
输出类型设置
| 参数 | 解释 |
|---|---|
输出类型 |
参数解释:该参数用于选择步骤输出的视觉结果类型。 值列表:抓取类视觉结果、轨迹类视觉结果、抓取类机器人路径、自定义 默认值:抓取类视觉结果 调节说明:根据实际需求选择对应的输出类型。 |
抓取类视觉结果
该输出类型适用于主控、标准接口或 Adapter 通信方式。
在不同通信方式下,Mech-Viz均可接收该类型端口输出的视觉结果,仅通信逻辑有所差异:
-
当选择主控通信方式时,视觉系统将发送视觉结果给机器人。
-
当选择标准接口或 Adapter 通信方式时,外部设备(机器人、PLC 或上位机)通过发送指令到视觉系统,视觉系统将视觉结果返回给外部设备。
使用场景
| 参数 | 解释 |
|---|---|
选择场景 |
参数解释:选择当前方案的使用场景。 值列表:3D模板匹配(工件上下料、定位装配等)、拆垛及其他 调节说明:
默认值:3D模板匹配(工件上下料、定位装配等) |
数据转换方式 |
参数解释:通过选择结果转换方式,该步骤可将识别结果转换成抓取所需的数据类型。 值列表:根据工件中心点生成抓取策略、根据抓取点生成抓取策略
默认值:根据工件中心点生成抓取策略 |
无需制作点云模板的工件 |
参数解释:选择无需制作点云模板的工件,该步骤可输出该工件的抓取相关信息。当使用场景为“拆垛及其他”时,需设置该参数。 |
碰撞检测设置
| 参数 | 解释 |
|---|---|
输出点云 |
参数解释:该参数可输出点云到Mech-Viz,通常用于碰撞检测。 默认值:勾选 |
点云在相机坐标系下 |
参数解释:点云在相机坐标系下时,需勾选此参数。勾选后,点云将被转换到机器人坐标系下,然后发给Mech-Viz;未勾选时,点云将直接发送给Mech-Viz。 默认值:勾选 |
移除非简易几何体工件点云 |
参数解释:启用后,Mech-Vision将移除与非简易几何体类型工件的碰撞模型重合的点云,以避免点云对碰撞检测的干扰。当使用场景为“匹配(工件上下料、定位装配等)”时,需设置该参数。 默认值:不勾选 调节说明:如需在抓取到放置的整个过程中检测工件碰撞,请勾选该参数,并确保已为相关工件配置碰撞模型。请注意,该参数对在工件库中使用简易几何体生成的工件无效。 |
工件点云搜索半径 |
参数解释:以工件点云中的任意点为圆心,搜索半径内的点云将被移除。当勾选移除非简易几何体工件点云后,需设置该参数。 默认值:3 mm |
其他端口
| 参数 | 解释 |
|---|---|
抓取点标签 |
参数解释:勾选后,步骤将新增“抓取点标签”输入端口。 默认值:不勾选 |
工件尺寸 |
参数解释:勾选后,步骤将新增“工件尺寸”输入端口。 默认值:不勾选 |
抓取点偏置 |
参数解释:勾选后,步骤将新增“抓取点偏置”输入端口。 默认值:不勾选 |
更新场景物体 |
参数解释:该参数一般用于需要动态更新料筐位姿的场景。勾选后,步骤将增加“场景物体名称”、“场景物体尺寸”、“场景物体位姿”输入端口。 默认值:不勾选 |
自定义端口名 |
参数解释:该参数用于添加自定义输入端口。 调节说明:多个端口请用半角分号(;)分隔。 |
漂移校正
| 参数 | 解释 |
|---|---|
自动校正视觉系统漂移 |
参数解释:勾选该参数后,将自动校正视觉系统精度漂移。该参数仅在精度误差分析工具中的EIH/ETH视觉系统漂移自校正功能部署完成后显示。 默认值:勾选 调节说明:EIH/ETH视觉系统漂移自校正功能部署完成后,可勾选该参数,用于开启自校正功能。 |
轨迹类视觉结果
该输出类型适用于主控、标准接口或 Adapter 通信方式。
在不同通信方式下,Mech-Viz均可接收该类型端口输出的视觉结果,仅通信逻辑有所差异:
-
当选择主控通信方式时,视觉系统将发送视觉结果给机器人。
-
当选择标准接口或 Adapter 通信方式时,外部设备(机器人、PLC 或上位机)通过发送指令到视觉系统,视觉系统将视觉结果返回给外部设备。
使用场景
| 参数 | 解释 |
|---|---|
选择场景 |
参数解释:选择当前方案的使用场景。 值列表:匹配、其他 调节说明:
默认值:匹配 |
碰撞检测设置
| 参数 | 解释 |
|---|---|
输出点云 |
参数解释:该参数可输出点云到Mech-Viz,通常用于碰撞检测。 默认值:勾选 |
点云在相机坐标系下 |
参数解释:点云在相机坐标系下时,需勾选此参数。勾选后,点云将被转换到机器人坐标系下,然后发给Mech-Viz;未勾选时,点云将直接发送给Mech-Viz。 默认值:勾选 |
其他端口
| 参数 | 解释 |
|---|---|
更新场景物体 |
参数解释:该参数一般用于需要动态更新料筐位姿的场景。勾选后,步骤将增加“场景物体名称”、“场景物体尺寸”、“场景物体位姿”输入端口。 默认值:不勾选 |
自定义端口名 |
参数解释:该参数用于添加自定义输入端口。 调节说明:多个端口请用半角分号(;)分隔。 |
漂移校正
| 参数 | 解释 |
|---|---|
自动校正视觉系统漂移 |
参数解释:勾选该参数后,将自动校正视觉系统精度漂移。该参数仅在精度误差分析工具中的EIH/ETH视觉系统漂移自校正功能部署完成后显示。 默认值:勾选 调节说明:EIH/ETH视觉系统漂移自校正功能部署完成后,可勾选该参数,用于开启自校正功能。 |