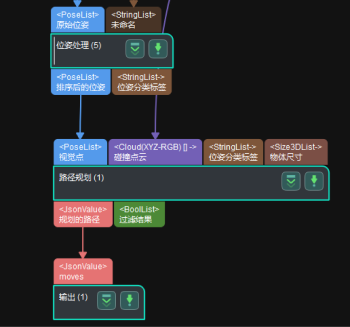
路径规划
使用场景
该步骤一般在通信方式为标准接口或 Adapter,只需规划在视觉目标附近的机器人运动路径的项目中使用。通过建立场景、传入视觉点和点云进行碰撞检测和路径规划并最终输出无碰撞的机器人路径。
该步骤一般的前接和后接步骤如下:
-
前接步骤:位姿调整和位姿处理相关的步骤。
-
后接步骤:“输出”步骤(“输出类型”参数设置为“抓取类机器人路径”)。
输入与输出
输入
| 输入端口 | 数据类型 | 描述 |
|---|---|---|
抓取点 |
Pose[] |
工件抓取点列表。 |
抓取点信息 |
JsonValue |
抓取点相关信息,包括工件名称、抓取点名称、抓取点标签等。 |
碰撞点云 |
PointCloud[] |
此端口输入的点云用于进行与末端工具的碰撞检测(需在“路径规划工具”内打开点云碰撞检测)。 |
抓取点标签 |
String[] |
工件库中工件抓取点的标签,通常用于标准接口通信时与上位机的标签通信。 |
工件尺寸 |
Size3D[] |
工件的尺寸。 |
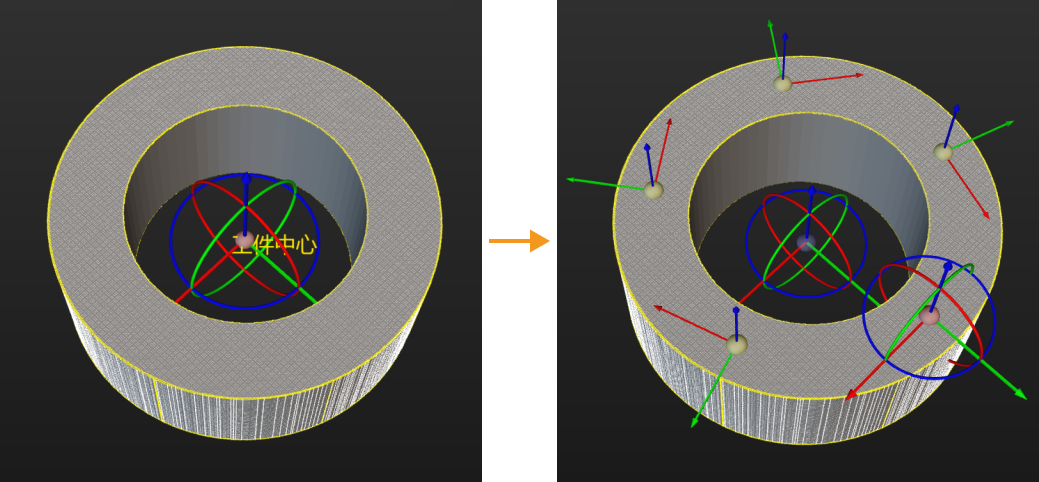
抓取点偏置 |
Pose[] |
抓取点相对于工件中心点的偏置。 |
场景物体名称 |
String[] |
场景物体名称列表,列表中物体的尺寸和位姿将被更新。 |
场景物体尺寸 |
Size3D[] |
场景物体尺寸列表,将按照列表中的顺序更新场景物体尺寸。 |
场景物体位姿 |
Pose[] |
场景物体位姿列表,将按照列表中的顺序更新场景物体位姿。 |
参数说明
路径规划设置
| 参数 | 解释 |
|---|---|
工作流程配置 |
参数解释:打开路径规划工具进行工作流程相关配置,并从已配置的工作流程中选择一个工作流程。 |
更新场景物体 |
参数解释:开启该选项后,此步骤将增加场景物体名称、场景物体尺寸、和场景物体位姿端口,用于更新料筐等场景物体的位姿和尺寸。 默认值:关闭 |
使用场景
| 参数 | 解释 |
|---|---|
选择场景 |
参数解释:选择当前方案的使用场景。 值列表:3D模板匹配(工件上下料、定位装配等)、拆垛及其他 调节说明:
默认值:3D模板匹配(工件上下料、定位装配等) |
数据转换方式 |
参数解释:通过选择结果转换方式,该步骤可将识别结果转换成抓取所需的数据类型。 值列表:根据工件中心点生成抓取策略、根据抓取点生成抓取策略
默认值:根据工件中心点生成抓取策略 |
无需制作点云模板的工件 |
参数解释:选择无需制作点云模板的工件,该步骤可输出该工件的抓取相关信息。当使用场景为“拆垛及其他”时,需设置该参数。 |
碰撞检测设置
| 参数 | 解释 |
|---|---|
点云在相机坐标系下 |
参数解释:点云在相机坐标系下时,需勾选此参数。勾选后,点云将被转换到机器人坐标系下,然后输入到路径规划工具;未勾选时,点云将直接输入到路径规划工具。 默认值:勾选 |
移除非简易几何体工件点云 |
参数解释:启用后,Mech-Vision将移除与非简易几何体类型工件的碰撞模型重合的点云,以避免点云对碰撞检测的干扰。当使用场景为“匹配(工件上下料、定位装配等)”时,需设置该参数。 默认值:不勾选 调节说明:如需在抓取到放置的整个过程中检测工件碰撞,请勾选该参数,并确保已为相关工件配置碰撞模型。请注意,该参数对在工件库中使用简易几何体生成的工件无效。 |
工件点云搜索半径 |
参数解释:以工件点云中的任意点为圆心,搜索半径内的点云将被移除。当勾选移除非简易几何体工件点云后,需设置该参数。 默认值:3 mm |